2. Адаптация параметров сверхширокополосного лоцирующего импульса при моноимпульсной локации малозаметных объектов.
Использование для моноимпульсной локации малозаметных объектов сверхширокополосных электромагнитных импульсов открывает новые возможности для повышения точности определения параметров цели и улучшения характеристик сопровождения. Ширина спектра лоцирующего импульса оказывается в данном случае столь большой, что для различных частот падающего излучения коэффициент отражения цели (величина эффективной отражающей поверхности) может существенно различаться. В этом случае приведение диапазона частот лоцирующего импульса в соответствие с диапазоном максимальных значений эффективной отражающей поверхности цели может дать существенный выигрыш в точности оценки динамических параметров лоцируемого объекта.
2.1. Разработка физической и математической моделей отражения мощных сверхширокополосных электромагнитных импульсов от объектов с низкоотражающими покрытиями.
При отражении
электромагнитного импульса от цели вследствие инерции внутренних движений в
материале поверхности (дисперсии) и характерной пространственной структуры цели
отраженное поле зависит от падающего поля, действующего в других точках и в
другие моменты времени. Пусть амплитуда падающего на объект поля не слишком
велика, так что процесс отражения электромагнитного импульса от поверхности
цели можно считать линейным. Математически процессы в линейной системе,
находящейся под действием силы
![]() , описываются уравнениями вида
, описываются уравнениями вида
где
![]() и
и
![]() - некоторые линейные, в общем случае
интегро-дифференциальные, операторы. Вводя обозначения
- некоторые линейные, в общем случае
интегро-дифференциальные, операторы. Вводя обозначения
![]() ,
,
решение уравнения (2.1), соответствующие нулевым начальным условиям, можно записать в виде
 (2.2)
(2.2)
где функция
![]() зависит только от вида оператора
зависит только от вида оператора
![]() и не зависит от
и не зависит от
![]() . Для систем с постоянными
параметрами уравнение (2.2) принимает следующий вид
. Для систем с постоянными
параметрами уравнение (2.2) принимает следующий вид
 (2.3)
(2.3)
что эквивалентно прохождению
сигнала
![]() через
линейный фильтр с импульсной передаточной функцией
через
линейный фильтр с импульсной передаточной функцией
![]() . Переходя к частотному
представлению, из выражения (2.3) получим
. Переходя к частотному
представлению, из выражения (2.3) получим
Заменяя теперь в уравнении (2.4)
![]() на спектр отраженного от
цели импульса
на спектр отраженного от
цели импульса
![]() ,
,
![]() на спектр падающего на
цель импульса
на спектр падающего на
цель импульса
![]() и
и
![]() на частотную передаточную
функцию цели
на частотную передаточную
функцию цели
![]() (зависящую
от частоты эффективную отражающую поверхность цели), получим
(зависящую
от частоты эффективную отражающую поверхность цели), получим
Таким образом, спектр отраженного импульса содержит полную информацию о спектральных особенностях эффективной отражающей поверхности цели.
Отметим, что существенной особенностью низкоотражающих покрытий является низкий коэффициент отражения в определенном интервале частот. Однако для сверхширокополосных лоцирующих импульсов, имеющих ширину спектра значительно больше этого частотного интервала, величина эффективной отражающей поверхности цели может быть уже не малой.
2.2. Принцип адаптации спектра при локации объекта.
В настоящем разделе будет изложен принцип адаптации спектра лоцирующего сигнала и оценено увеличение точности оценки параметров цели при использовании адаптивной процедуры моноимпульсной локации.
2.2.1. Подстройка спектра лоцирующего сигнала.
Методы генерации мощных наносекундных электромагнитных импульсов в принципе допускают оперативную перестройку параметров излучаемых сигналов и, в частности, изменение спектра излучения, в том числе за счет использования блочно-модульного способа построения излучающей системы. Процедура адаптации параметров лоцирующего импульса может быть в этом случае построена по следующему принципу.
На первом этапе
адаптивной процедуры производится облучение пространства мощным
сверхширокополосным электромагнитным импульсом и по отраженному сигналу
принимается решение об обнаружении цели. Параллельно с излучением зондирующего
импульса проводится его спектральный анализ и результаты ![]() записываются в блок хранения
информации. В случае положительного решения об обнаружении производится анализ
спектра отраженного сигнала
записываются в блок хранения
информации. В случае положительного решения об обнаружении производится анализ
спектра отраженного сигнала ![]() . Для нахождения максимума в спектральной
характеристике отражающей поверхности цели
. Для нахождения максимума в спектральной
характеристике отражающей поверхности цели ![]() в вычислительной системе образуется отношение
в вычислительной системе образуется отношение
![]() и проводится
анализ максимумов этой величины. Если один или несколько максимумов оказываются
выше среднего значения эффективной отражающей поверхности, то производится
подстройка спектра излучаемого импульса так, чтобы максимальные компоненты
спектра лоцирующего импульса приходились на максимальное значение эффективной
спектральной отражающей поверхности. При этом ширина спектра излучаемого
импульса также должна согласовываться с зависимостью
и проводится
анализ максимумов этой величины. Если один или несколько максимумов оказываются
выше среднего значения эффективной отражающей поверхности, то производится
подстройка спектра излучаемого импульса так, чтобы максимальные компоненты
спектра лоцирующего импульса приходились на максимальное значение эффективной
спектральной отражающей поверхности. При этом ширина спектра излучаемого
импульса также должна согласовываться с зависимостью ![]() , чтобы энергия отраженного сигнала
принимала максимально возможное значение. Конкретные законы изменения спектра
излучаемого импульса в зависимости от измеренной величины
, чтобы энергия отраженного сигнала
принимала максимально возможное значение. Конкретные законы изменения спектра
излучаемого импульса в зависимости от измеренной величины ![]() должны быть разработаны для
конкретных экспериментальных параметров генерирующей системы, в частности,
числа независимых каналов излучения, частотного перекрытия диапазона генерации,
возможных характеристик предполагаемых целей, величины возможного сужения
спектра импульса генерации около несущей частоты и т. п.. Отметим, что при
наличии ошибок определения спектральных амплитуд эффективной отражающей
поверхности цели адаптацию следует проводить, когда разность максимального
значения
должны быть разработаны для
конкретных экспериментальных параметров генерирующей системы, в частности,
числа независимых каналов излучения, частотного перекрытия диапазона генерации,
возможных характеристик предполагаемых целей, величины возможного сужения
спектра импульса генерации около несущей частоты и т. п.. Отметим, что при
наличии ошибок определения спектральных амплитуд эффективной отражающей
поверхности цели адаптацию следует проводить, когда разность максимального
значения ![]() и
среднего значения станет больше ошибки определения спектральных компонент
и
среднего значения станет больше ошибки определения спектральных компонент ![]() .
.
В процессе сопровождения
цели возможны медленные изменения спектральной характеристики эффективной
отражающей поверхности, вызванные, например, поворотом цели и т. п.. В этом
случае для сохранения высокой точности определения динамических параметров цели
необходимо периодически проводить коррекцию спектра лоцирующего импульса,
которая будет состоять в повторном измерении спектра отраженного сигнала,
определении ![]() и
изменении в соответствии с этой новой зависимостью спектральных характеристик
излучаемого импульса.
и
изменении в соответствии с этой новой зависимостью спектральных характеристик
излучаемого импульса.
Отметим, что
измерение спектральных характеристик эффективной отражающей поверхности цели
позволяет также определять, какого класса объект находится в воздушном
пространстве. В случае создания банка информации по спектральным портретам
возможных целей периодическая коррекция параметров лоцирующего импульса может
проводиться без обратной связи (без повторных измерений ![]() ) только по данным, хранящимся в
банке информации, и динамическим характеристикам цели (дальность, скорость,
угол наблюдения и т. п.).
) только по данным, хранящимся в
банке информации, и динамическим характеристикам цели (дальность, скорость,
угол наблюдения и т. п.).
2.2.2. Точность определения параметров цели при адаптивной процедуре локации.
Оценим увеличение
точности определения параметров цели при использовании адаптивной процедуры
локации. Вследствие наличия геометрических неоднородностей профиля объекта и
частотной дисперсии в материале покрытия эффективная площадь рассеяния цели
может различаться на разных частотах в несколько раз. Пусть для определенности
максимальное значение
![]() достигается
вблизи частоты
достигается
вблизи частоты
![]() и
больше среднего по спектру значения эффективной отражающей поверхности цели
и
больше среднего по спектру значения эффективной отражающей поверхности цели
![]() в
в
![]() раз:
раз:
Пусть для определенности весь
спектр лоцирующего импульса находится вблизи частоты
![]() . Тогда выигрыш в энергии
отраженного от цели сигнала также составляет
. Тогда выигрыш в энергии
отраженного от цели сигнала также составляет
![]() раз. Действительно, отношение сигнал/шум
раз. Действительно, отношение сигнал/шум
![]() определяется следующим
выражением
определяется следующим
выражением
 (2.7)
(2.7)
где
 представляет полную энергию
принимаемого сигнала
представляет полную энергию
принимаемого сигнала
![]() за
время длительности импульса
за
время длительности импульса
![]() , а
, а
![]() - спектральная плотность белого шума, на фоне
которого необходимо выделить отраженный сигнал. Для принимаемого сигнала
энергия
- спектральная плотность белого шума, на фоне
которого необходимо выделить отраженный сигнал. Для принимаемого сигнала
энергия
![]() определяется
следующим выражением (см. выражение (1.1)):
определяется
следующим выражением (см. выражение (1.1)):
 (2.8)
(2.8)
где
![]() - расстояние от радиолокационной станции до
цели,
- расстояние от радиолокационной станции до
цели, ![]() -
коэффициент усиления передающей антенны,
-
коэффициент усиления передающей антенны,
![]() - эффективная площадь апертуры приемной
антенны, а
- эффективная площадь апертуры приемной
антенны, а
![]() -
энергия лоцирующего импульса. Если импульсная мощность передатчика
моноимпульсной радиолокационной станции есть
-
энергия лоцирующего импульса. Если импульсная мощность передатчика
моноимпульсной радиолокационной станции есть
![]() , а длительность импульса передатчика
, а длительность импульса передатчика
![]() , то энергия передаваемого
сигнала определяется выражением
, то энергия передаваемого
сигнала определяется выражением
![]() . В результате отношение сигнал/шум принимает
вид
. В результате отношение сигнал/шум принимает
вид
 (2.9)
(2.9)
Таким образом, отношение сигнал/шум
![]() увеличивается в
увеличивается в
![]() раз при увеличении
эффективной площади отражающей поверхности
раз при увеличении
эффективной площади отражающей поверхности
![]() в
в
![]() раз. Такое увеличение отношения сигнал/шум
соответствует эффективному росту мощности передатчика также в
раз. Такое увеличение отношения сигнал/шум
соответствует эффективному росту мощности передатчика также в
![]() раз, что подтверждает
важность использования адаптивной процедуры при моноимпульсной локации
малозаметных объектов.
раз, что подтверждает
важность использования адаптивной процедуры при моноимпульсной локации
малозаметных объектов.
Дисперсии ошибок
оценок параметров цели (дальности, угловых координат, скорости и др.) обратно
пропорциональны отношению сигнал/шум
![]() для отраженного сигнала. Следовательно,
абсолютные величины ошибок уменьшаются в
для отраженного сигнала. Следовательно,
абсолютные величины ошибок уменьшаются в
![]() раз при росте отношения сигнал/шум в
раз при росте отношения сигнал/шум в
![]() раз. Например, при
раз. Например, при
![]() выигрыш в точности оценок
параметров цели составляет более двух раз.
выигрыш в точности оценок
параметров цели составляет более двух раз.
Таким образом, применение адаптивной процедуры моноимпульсной локации позволяет в определенных случаях существенно (в несколько раз) снизить ошибки определения параметров цели.
Отметим, что для задачи обнаружения цели адаптация параметров лоцирующего импульса не дает, вообще говоря, выигрыша по чувствительности, так как в условиях отсутствия информации о спектральных характеристиках цели (априорной неопределенности) эффективность процедуры адаптации оказывается невысокой. В то же время при наличии дополнительной априорной информации о характере цели возможна частичная адаптация с соответствующим ростом отношения сигнал/шум, что приведет к увеличению дальности обнаружения и улучшению оценок параметров цели.
2.3. Разработка цифрового алгоритма реализации адаптивной процедуры моноимпульсной локации малозаметных объектов сверхширокополосными электромагнитными импульсами.
В настоящем разделе будут рассмотрены алгоритмы измерения спектральных характеристик отраженного сигнала, оценены ошибки таких измерений и получено значение порогового отношения сигнал/шум, позволяющего применить адаптивную процедуру моноимпульсной локации. Будут проанализированы возможности расчетного метода определения спектра, определения максимумов спектральной плотности по приближению принимаемого сигнала конечным рядом и оценке параметров этого ряда, а также точность фильтрового метода определения спектральной плотности. Для указанных методов будут исследованы численные алгоритмы, реализующие соответствующие измерения, а также аппаратные схемы, существенно упрощающие практическую реализацию измерительных установок.
2.3.1. Расчетный метод определения спектральных характеристик сигнала.
Для
детерминированного физически реализуемого сигнала
![]() может быть введен сопряженный по Фурье сигнал
может быть введен сопряженный по Фурье сигнал
![]() , причем оба эти
сигнала связаны парой преобразований Фурье:
, причем оба эти
сигнала связаны парой преобразований Фурье:
 ,
,
 (2.10)
(2.10)
В таком случае спектр может быть
однозначно определен по временной зависимости сигнала. Однако, в реальных
установках всегда присутствуют собственные шумы, кроме того, даже в
гипотетическом случае отсутствия шумов точность измерения зависимости
![]() на практике не может быть
бесконечной. Указанные причины обуславливают необходимость при определении
спектра сигнала исходить из более общей модели, учитывающей как наличие
внутренних шумов, так и конечную инструментальную точность измерения сигнала.
Таким образом, для анализа процесса измерения спектра необходимо исходить из
модели фильтрации сигнала
на практике не может быть
бесконечной. Указанные причины обуславливают необходимость при определении
спектра сигнала исходить из более общей модели, учитывающей как наличие
внутренних шумов, так и конечную инструментальную точность измерения сигнала.
Таким образом, для анализа процесса измерения спектра необходимо исходить из
модели фильтрации сигнала
![]() в приемных шумах установки
в приемных шумах установки
![]() , т. е. постановка задачи
может быть следующей: на входе приемного устройства имеется реализация
случайного процесса
, т. е. постановка задачи
может быть следующей: на входе приемного устройства имеется реализация
случайного процесса
![]() длительностью
длительностью
![]() , представляющего
собой смесь сигнала
, представляющего
собой смесь сигнала
![]() с
неизвестными параметрами и шума
с
неизвестными параметрами и шума
![]() :
:
В общем случае модель шума
![]() может быть достаточно
сложной, однако во многих практически важных ситуациях шум с достаточной
степенью точности можно аппроксимировать стационарным гауссовским процессом с
известными параметрами. Требуется по конкретной реализации
может быть достаточно
сложной, однако во многих практически важных ситуациях шум с достаточной
степенью точности можно аппроксимировать стационарным гауссовским процессом с
известными параметрами. Требуется по конкретной реализации
![]() определить спектральные
характеристики квазидетерминированного сигнала
определить спектральные
характеристики квазидетерминированного сигнала
![]() .
.
Пусть для
определенности длительность
![]() сигнала
сигнала
![]() значительно меньше времени измерения
значительно меньше времени измерения
![]() . В этом случае для
реализации случайного процесса
. В этом случае для
реализации случайного процесса
![]() справедливо преобразование Фурье согласно
выражениям (2.10). Однако в силу случайного характера процесса
справедливо преобразование Фурье согласно
выражениям (2.10). Однако в силу случайного характера процесса
![]() его Фурье образ также
будет случайной величиной:
его Фурье образ также
будет случайной величиной:
 (2.12)
(2.12)
Здесь
![]() - искомый спектр сигнала, а
- искомый спектр сигнала, а
![]() - случайная комплексная
функция частоты [1] с известными характеристиками распределения (
- случайная комплексная
функция частоты [1] с известными характеристиками распределения (![]() связано с
связано с
![]() линейно, поэтому
линейно, поэтому
![]() будет комплексным
стационарным гауссовским процессом с нулевым средним и с корреляционной
матрицей, определяющейся корреляционной функцией
будет комплексным
стационарным гауссовским процессом с нулевым средним и с корреляционной
матрицей, определяющейся корреляционной функцией
![]() ).
).
Определим
характеристики измерения спектра
![]() , полученные при обработке случайного
процесса
, полученные при обработке случайного
процесса
![]() .
Возьмем в качестве оценки
.
Возьмем в качестве оценки
![]() спектра
спектра
![]() спектр случайной величины
спектр случайной величины
![]() . Очевидно, что оценка спектра
. Очевидно, что оценка спектра
![]() также является случайной
величиной. Найдем ее характеристики. Среднее значение
также является случайной
величиной. Найдем ее характеристики. Среднее значение
![]() , т. е. среднее по ансамблю значение
спектра
, т. е. среднее по ансамблю значение
спектра
![]() случайного
процесса
случайного
процесса
![]() найдем,
усредняя выражение (2.12) по ансамблю реализаций и учитывая, что среднее
значение
найдем,
усредняя выражение (2.12) по ансамблю реализаций и учитывая, что среднее
значение
![]() равно
нулю:
равно
нулю:
Таким образом, оценка спектра
![]() несмещенная. Найдем
дисперсию оценки
несмещенная. Найдем
дисперсию оценки
![]() .
Дисперсия комплексного случайного процесса с нулевым средним по определению
равна среднему значению от квадрата модуля случайного процесса [1,2]. В
результате имеем
.
Дисперсия комплексного случайного процесса с нулевым средним по определению
равна среднему значению от квадрата модуля случайного процесса [1,2]. В
результате имеем
где
![]() пропорциональна спектральной плотности
процесса
пропорциональна спектральной плотности
процесса
![]() ,
посчитанной для длины реализации
,
посчитанной для длины реализации
![]() . Выражая
. Выражая
![]() через корреляционную функцию процесса
через корреляционную функцию процесса
![]() , найдем:
, найдем:
 (2.15)
(2.15)
Здесь
![]() - корреляционная функция процесса
- корреляционная функция процесса
![]() . Делая в последнем
выражении замену переменных
. Делая в последнем
выражении замену переменных
![]() , двойной интеграл можно преобразовать к однократному.
В результате имеем
, двойной интеграл можно преобразовать к однократному.
В результате имеем
Учитывая, что случайный процесс
![]() имеет белый спектр, для
корреляционной функции
имеет белый спектр, для
корреляционной функции
![]() имеем
имеем
где
![]() - спектральная плотность белого шума
- спектральная плотность белого шума
![]() . Тогда для дисперсии
оценки спектра имеем из выражений (2.16), (2.17):
. Тогда для дисперсии
оценки спектра имеем из выражений (2.16), (2.17):
Таким образом,
дисперсия оказывается тем больше, чем длиннее интервал наблюдения
![]() . Очевидно, что при
усреднении по всей реализации дисперсия не стремится к нулю, т. е. процесс
. Очевидно, что при
усреднении по всей реализации дисперсия не стремится к нулю, т. е. процесс
![]() не является эргодическим
(такое заключение верно, вообще говоря, для любой пары процессов, связанных
преобразованием Фурье: если процесс является эргодическим, то сопряженный ему
по Фурье процесс таковым не является [1]).
не является эргодическим
(такое заключение верно, вообще говоря, для любой пары процессов, связанных
преобразованием Фурье: если процесс является эргодическим, то сопряженный ему
по Фурье процесс таковым не является [1]).
Выбирая минимально
возможный интервал наблюдения, равный длительности сигнала ![]() , для дисперсии оценки спектра
найдем:
, для дисперсии оценки спектра
найдем:
Таким образом, дисперсия ошибки
измерения спектра не зависит от величины спектральной амплитуды, т. е.
относительная точность будет наибольшей для максимальных значений спектральных
амплитуд
![]() . Для
компонент с частотой
. Для
компонент с частотой
![]() вблизи
максимума спектра
вблизи
максимума спектра
![]() получим
следующее значение относительной точности измерений
получим
следующее значение относительной точности измерений
Отношение сигнал/шум
согласно выражению (2.7) можно приближенно записать в следующем виде,
предполагая, что спектр сигнала
![]() не имеет узких и высоких пиков
не имеет узких и высоких пиков
где учтено, что в силу
широкополосности выполняется соотношение
![]() между эффективной шириной спектра и
длительностью импульса. Таким образом, сравнивая выражения (2.20) и (2.21),
окончательно для относительной ошибки определения спектральных амплитуд имеем:
между эффективной шириной спектра и
длительностью импульса. Таким образом, сравнивая выражения (2.20) и (2.21),
окончательно для относительной ошибки определения спектральных амплитуд имеем:
 (2.22)
(2.22)
Необходимо заметить,
что точно такая же относительная ошибка будет и в случае определения
спектральных амплитуд эффективной отражающей поверхности цели
![]() (см. выражение (2.5)), так
как спектр лоцирующего сигнала
(см. выражение (2.5)), так
как спектр лоцирующего сигнала
![]() в силу большого отношения сигнал/шум для него
может быть измерен с точностью, существенно превышающей (2.22).
в силу большого отношения сигнал/шум для него
может быть измерен с точностью, существенно превышающей (2.22).
Таким образом, измерение спектральных компонент эффективной отражающей поверхности цели может быть проведено по измерению спектра отраженного импульса, причем относительная ошибка измерения оказывается тем меньше, чем больше отношение сигнал/шум. Так, для отношения сигнал/шум, равного 10 (что достаточно для обнаружения цели), относительная точность определения спектральных компонент эффективной отражающей поверхности цели оказывается порядка 30 процентов, что, вообще говоря, недостаточно для эффективной работы процедуры адаптации параметров лоцирующего импульса. Для относительной точности в 10 процентов требуются отношения сигнал/шум не менее 100.
Практическая
реализация расчетного алгоритма (2.12) может быть выполнена на ЭВМ с помощью
дискретного преобразования Фурье, в частности, быстрого преобразования Фурье,
что, вообще говоря, требует существенных вычислительных затрат, поэтому в
режиме реального времени полный расчет спектральных амплитуд эффективной
отражающей поверхности цели может быть осуществлен только на современных
суперЭВМ. В то же время, учитывая относительно плавный характер изменения
спектра
![]() , можно
вычислять спектральные амплитуды только в нескольких точках частотной оси,
выбранных исходя из характеристик перестройки спектра генератора зондирующего
импульса. В этом случае можно ограничиться значениями спектральных амплитуд в
нескольких точках оси частот, что приведет к существенному сокращению объема
вычислений и даст возможность проводить обработку отраженного сигнала в режиме
реального времени на ЭВМ класса Пентиум-IV.
, можно
вычислять спектральные амплитуды только в нескольких точках частотной оси,
выбранных исходя из характеристик перестройки спектра генератора зондирующего
импульса. В этом случае можно ограничиться значениями спектральных амплитуд в
нескольких точках оси частот, что приведет к существенному сокращению объема
вычислений и даст возможность проводить обработку отраженного сигнала в режиме
реального времени на ЭВМ класса Пентиум-IV.
2.3.2. Измерение спектра отраженного импульса с усреднением.
Выражение (2.18) для
дисперсии оценки спектра сигнала ![]() не уменьшается с увеличением времени
измерения, т. е. усреднение по времени не приводит к уменьшению ошибки оценки
не уменьшается с увеличением времени
измерения, т. е. усреднение по времени не приводит к уменьшению ошибки оценки ![]() . Радикальным способом
снижения ошибки измерения спектра могло бы стать усреднение по ансамблю
реализаций случайного процесса
. Радикальным способом
снижения ошибки измерения спектра могло бы стать усреднение по ансамблю
реализаций случайного процесса ![]() . Однако, в большинстве практических случаев
для экспериментатора доступна всего одна реализация. В этом случае для стационарных
случайных процессов можно одну реализацию длительностью
. Однако, в большинстве практических случаев
для экспериментатора доступна всего одна реализация. В этом случае для стационарных
случайных процессов можно одну реализацию длительностью ![]() разбить на
разбить на ![]() более коротких реализаций
длительностью
более коротких реализаций
длительностью ![]() каждая,
вычислить спектр по каждой из коротких реализаций, а затем усреднить полученные
спектры по
каждая,
вычислить спектр по каждой из коротких реализаций, а затем усреднить полученные
спектры по ![]() реализациям.
К сожалению, указанное усреднение не эффективно для нестационарных случайных
процессов, в частности, для
реализациям.
К сожалению, указанное усреднение не эффективно для нестационарных случайных
процессов, в частности, для ![]() . В связи с этим в литературе широко
исследуются различные косвенные методы усреднения, в частности, метод
усреднения по спектральному окну [1,3-6].
. В связи с этим в литературе широко
исследуются различные косвенные методы усреднения, в частности, метод
усреднения по спектральному окну [1,3-6].
Метод усреднения по
окну основан на том, что вместо спектра в точке (оценка для данной частоты)
определяют некоторый усредненный по диапазону частот спектр, причем чем больше
частотный интервал усреднения (при постоянном ![]() ), тем меньше дисперсия оценки спектральных
амплитуд. Однако, вместе с этим, как правило, появляется смещение оценки,
которое увеличивается с увеличением диапазона частот усреднения. Действительно,
чем шире спектральное окно, тем сильнее будут отличаться усредненные
спектральные амплитуды от истинных значений. Таким образом, задачу оптимального
выбора спектрального окна можно сформулировать по-разному: можно стремиться
минимизировать смещение оценки при заданном значении дисперсии или наоборот, а
также можно для заданной спектральной плотности определять окно,
соответствующее минимальному рассеянию ошибки измерения. Для задачи определения
частот, на которых спектральные амплитуды эффективной отражающей поверхности
цели принимают максимальные значения, видимо, более существенным является
критерий минимальности рассеяния оценки (минимума полной среднеквадратической
ошибки). В то же время при численной обработке результатов измерений в реальном
времени необходимо учитывать и вычислительные затраты, требуемые для реализации
соответствующей функции спектрального окна. Различные виды окон, используемых
при спектральном анализе, подробно исследованы в [1,3-5].
), тем меньше дисперсия оценки спектральных
амплитуд. Однако, вместе с этим, как правило, появляется смещение оценки,
которое увеличивается с увеличением диапазона частот усреднения. Действительно,
чем шире спектральное окно, тем сильнее будут отличаться усредненные
спектральные амплитуды от истинных значений. Таким образом, задачу оптимального
выбора спектрального окна можно сформулировать по-разному: можно стремиться
минимизировать смещение оценки при заданном значении дисперсии или наоборот, а
также можно для заданной спектральной плотности определять окно,
соответствующее минимальному рассеянию ошибки измерения. Для задачи определения
частот, на которых спектральные амплитуды эффективной отражающей поверхности
цели принимают максимальные значения, видимо, более существенным является
критерий минимальности рассеяния оценки (минимума полной среднеквадратической
ошибки). В то же время при численной обработке результатов измерений в реальном
времени необходимо учитывать и вычислительные затраты, требуемые для реализации
соответствующей функции спектрального окна. Различные виды окон, используемых
при спектральном анализе, подробно исследованы в [1,3-5].
До сих пор в основном
рассматривались вычислительные методы определения спектра сигнала. Существуют
также аппаратурные способы экспериментального определения спектральных
амплитуд. Наибольшее распространение получил так называемый фильтровой метод
[1,5-8], принципиальная схема которого приведена на
рис. 2.1. Процесс ![]() воздействует на
перестраиваемый по частоте узкополосный (по сравнению с полосой частот сигнала)
линейный фильтр, выходной процесс которого
воздействует на
перестраиваемый по частоте узкополосный (по сравнению с полосой частот сигнала)
линейный фильтр, выходной процесс которого ![]() возводится в квадрат и затем осредняется за
достаточно большой интервал времени
возводится в квадрат и затем осредняется за
достаточно большой интервал времени ![]() . При некоторых условиях последние две
операции выполняются приближенно в термоприборах или раздельно при помощи
двустороннего квадратичного элемента и осредняющего фильтра. Выходной сигнал в
определенный момент времени оказывается пропорциональным значению квадрата
модуля спектральной амплитуды на частоте узкополосного фильтра.
. При некоторых условиях последние две
операции выполняются приближенно в термоприборах или раздельно при помощи
двустороннего квадратичного элемента и осредняющего фильтра. Выходной сигнал в
определенный момент времени оказывается пропорциональным значению квадрата
модуля спектральной амплитуды на частоте узкополосного фильтра.
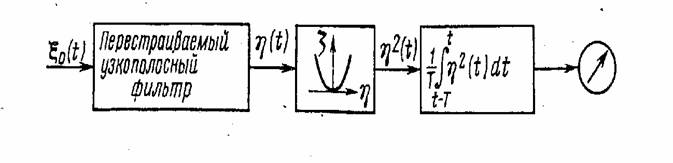
Рис. 2.1. Функциональная схема фильтрового измерителя спектра.
При таком способе измерений осуществляется сглаживание по частоте (в пределах полосы пропускания узкополосного фильтра). Такое сглаживание согласуется с физическим принципом измерения спектра. Из-за конечной разрешающей способности спектроанализаторов практически невозможно определить значение спектра на единственной фиксированной частоте, а можно лишь определить "интегральное" значение спектра в достаточно малом, но конечном диапазоне частот. К сожалению, как и в методе усреднения по спектральному окну оценка спектральных амплитуд оказывается смещенной, причем смещение зависит как от амплитудно-частотной характеристики узкополосного фильтра, так и от спектра сигнала.
К величине полосы пропускания (разрешающей способности) узкополосного фильтра предъявляются противоречивые требования: для уменьшения смещения оценки необходимо брать малые значения полосы, тогда как для уменьшения дисперсии оценки полосу следует увеличивать. Для спектральной плотности, плавно изменяющейся с частотой, допустимо брать большие значения полосы, чем для быстро изменяющейся спектральной плотности. Следует также учитывать, что с уменьшением полосы увеличивается длительность переходного процесса, что приводит к увеличению времени анализа на каждой фиксированной частоте.
Для определения модуля спектральных амплитуд во всем диапазоне возможных частот необходимо либо создавать спектроанализаторы с параллельными каналами, либо последовательно (дискретно или непрерывно) изменять центральную частоту узкополосного фильтра. Вместо перестройки фильтра по частоте можно производить смещение по частоте спектра анализируемого случайного процесса путем преобразования частоты с помощью перестраиваемого гетеродина, например, по линейному закону во времени. Структурная схема подобного измерителя приведена на рис. 2.2. Работой измерителя управляет генератор пилообразного напряжения, в результате чего изменяется частота гетеродина. Скорость изменения частоты гетеродина должна быть малой, чтобы за время интегрирования частота существенно не менялась.
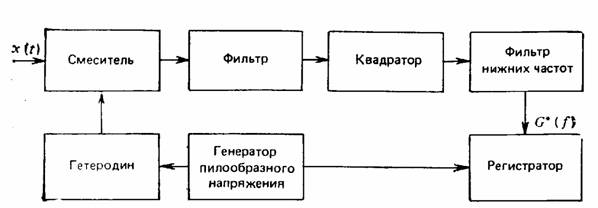
Рис. 2.2. Принципиальная схема фильтрового измерителя спектра с линейной перестройкой частоты гетеродина.
Преимуществом рассмотренных аппаратурных методов определения модуля спектральных амплитуд является относительно высокое быстродействие и возможность осуществления параллельной оценки для различных значений частот. В случае небольшого числа спектральных интервалов, что допустимо для реализации адаптивной процедуры подстройки спектра излучаемого импульса, задача создания такого измерительного устройства еще более упрощается.
2.3.3. Оценка спектральных амплитуд по оценке параметров квазидетерминированного сигнала.
Для оценки частот, на
которых спектральные амплитуды эффективной отражающей поверхности цели
![]() (отраженного сигнала
(отраженного сигнала
![]() ) принимают максимальное
значение, можно использовать и метод оценки параметров квазидетерминированного
сигнала. Пусть опять на входе приемного устройства имеется реализация
случайного процесса
) принимают максимальное
значение, можно использовать и метод оценки параметров квазидетерминированного
сигнала. Пусть опять на входе приемного устройства имеется реализация
случайного процесса
![]() длительностью
длительностью
![]() , которая
представляет собой смесь квазидетерминированного сигнала с неизвестными
параметрами
, которая
представляет собой смесь квазидетерминированного сигнала с неизвестными
параметрами
![]() и
шума
и
шума ![]() . Пусть шум
можно считать стационарным случайным процессом с нулевым средним значением и
известной корреляционной функцией
. Пусть шум
можно считать стационарным случайным процессом с нулевым средним значением и
известной корреляционной функцией
![]() . Сигнал
. Сигнал
![]() можно приближенно представить в виде
следующей линейной суммы:
можно приближенно представить в виде
следующей линейной суммы:
где
![]() - некоторые неизвестные числа, а
- некоторые неизвестные числа, а
![]() - заданные (выбранные)
функции времени.
- заданные (выбранные)
функции времени.
Если число членов в
ряде (2.23) конечно, то будет разница между
![]() и рядом. Однако, увеличивая число членов,
можно сделать сколь угодно малым квадрат погрешности аппроксимации:
и рядом. Однако, увеличивая число членов,
можно сделать сколь угодно малым квадрат погрешности аппроксимации:
 (2.24)
(2.24)
т. е. ряд будет сходящимся в среднем.
Из условия минимума
квадрата погрешности аппроксимации известного сигнала
![]() можно найти, что коэффициенты
можно найти, что коэффициенты
![]() определяются следующей
системой линейных уравнений (
определяются следующей
системой линейных уравнений (![]() )
)
 (2.25)
(2.25)
Для аналитического
представления
![]() в
виде ряда (2.23) функции
в
виде ряда (2.23) функции
![]() обычно
выбирают такими, чтобы обеспечить наиболее быструю сходимость ряда. Однако для
целей оценки спектральных амплитуд наиболее удобно, по-видимому, выбрать
функции
обычно
выбирают такими, чтобы обеспечить наиболее быструю сходимость ряда. Однако для
целей оценки спектральных амплитуд наиболее удобно, по-видимому, выбрать
функции
![]() так,
чтобы их спектры практически не пересекались (в простейшем случае можно разбить
весь спектральный диапазон на непересекающиеся подинтервалы, а затем для таких
непересекающихся частотных подинтервалов ввести функции с финитным спектром,
целиком находящимся внутри соответствующего подинтервала). В этом случае
коэффициенты
так,
чтобы их спектры практически не пересекались (в простейшем случае можно разбить
весь спектральный диапазон на непересекающиеся подинтервалы, а затем для таких
непересекающихся частотных подинтервалов ввести функции с финитным спектром,
целиком находящимся внутри соответствующего подинтервала). В этом случае
коэффициенты
![]() будут
пропорциональны величине спектральных амплитуд, принадлежащих соответствующему
диапазону частот.
будут
пропорциональны величине спектральных амплитуд, принадлежащих соответствующему
диапазону частот.
Таким образом, задача
определения сигнала
![]() по
одной реализации, наблюдаемой на интервале
по
одной реализации, наблюдаемой на интервале
![]() , может быть сведена к оценке коэффициентов
, может быть сведена к оценке коэффициентов
![]() ряда (2.23).
ряда (2.23).
Функционал плотности
вероятности анализируемого случайного процесса с точностью до членов, не
зависящих от сигнала
![]() ,
может быть записан в виде [1,2,6,9-11]
,
может быть записан в виде [1,2,6,9-11]
 (2.26)
(2.26)
Здесь
 (2.27)
(2.27)
 (2.28)
(2.28)
а функция
![]() определяется из следующего
интегрального уравнения
определяется из следующего
интегрального уравнения
 (2.29)
(2.29)
Решая уравнение
правдоподобия относительно неизвестных коэффициентов
![]()
 (2.30)
(2.30)
найдем систему
![]() линейных уравнений
линейных уравнений
относительно оценок
![]() . Из этой системы можно
получить следующие выражения для оценок коэффициентов ряда
. Из этой системы можно
получить следующие выражения для оценок коэффициентов ряда
Здесь
 (2.33)
(2.33)
- определитель системы линейных
уравнений (2.31);
![]() -
определитель, получающийся из определителя
-
определитель, получающийся из определителя
![]() заменой столбца
заменой столбца
![]() столбцом
столбцом
![]() ,
,
![]() - алгебраическое дополнение элементов
- алгебраическое дополнение элементов
![]() -го столбца (столбца
-го столбца (столбца
![]() ). При этом для квадратной
матрицы
). При этом для квадратной
матрицы
![]() справедливо
следующее соотношение
справедливо
следующее соотношение
 (2.34)
(2.34)
Учитывая, что
выражение для
![]() содержит
случайную и детерминированную составляющие, соотношение (2.27) можно переписать
в следующем виде:
содержит
случайную и детерминированную составляющие, соотношение (2.27) можно переписать
в следующем виде:
 (2.35)
(2.35)
где
 (2.36)
(2.36)
С учетом этого
соотношения для определителя
![]() найдем
найдем
учитывая, что
![]() , выражение для оценки коэффициентов
, выражение для оценки коэффициентов
![]() примет вид
примет вид
Принимая во внимание, что среднее
значение величин
![]() равно
нулю в силу выражения (2.36) и нулевого среднего значения процесса
равно
нулю в силу выражения (2.36) и нулевого среднего значения процесса
![]() , из выражения (2.38) можно
заключить, что оценки коэффициентов ряда
, из выражения (2.38) можно
заключить, что оценки коэффициентов ряда
![]() являются несмещенными.
являются несмещенными.
Корреляционная функция
оценок коэффициентов
![]() и
и
![]() определяется
следующим выражением
определяется
следующим выражением
 (2.39)
(2.39)
Тогда формула для дисперсии
оценки коэффициентов
![]() примет
вид
примет
вид
Пусть процесс
![]() является белым со
спектральной плотностью
является белым со
спектральной плотностью
![]() .
В этом случае корреляционная функция случайного процесса
.
В этом случае корреляционная функция случайного процесса
![]() представляется следующим выражением
представляется следующим выражением
Подставляя это выражение в исходное интегральное уравнение (2.29), получим
 (2.42)
(2.42)
При этом матрица коэффициентов
![]() будет диагональной для
ортогональных функций
будет диагональной для
ортогональных функций
![]() ,
а для дисперсии оценок
,
а для дисперсии оценок
![]() получаем
следующее выражение из (2.40)
получаем
следующее выражение из (2.40)
Следует отметить, что функции с
непересекающимися спектрами являются строго ортогональными только для
бесконечного интервала измерения
![]() . Однако, если интервал
. Однако, если интервал
![]() оказывается значительно больше, чем
длительность функций
оказывается значительно больше, чем
длительность функций
![]() ,
то приближенно условие ортогональности будет выполняться с достаточно высокой
точностью.
,
то приближенно условие ортогональности будет выполняться с достаточно высокой
точностью.
Для относительной точности оценки коэффициентов
ряда ![]() из
выражения (2.43) найдем
из
выражения (2.43) найдем
 (2.44)
(2.44)
Таким образом, с помощью оценки параметров ряда можно определить частоты максимальных значений спектральных амплитуд эффективной поверхности цели с такой же точностью, как и посредством измерения спектра отраженного импульса (см. (2.22)).
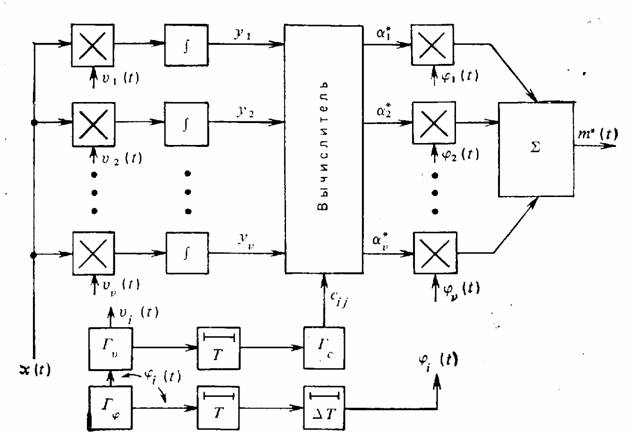
Рис. 2.3. Принципиальная схема оптимального измерителя параметров квазидетерминированного сигнала
![]()
Схема оптимального
измерителя квазидетерминированного сигнала приведена на рис. 2.3. Измеритель
функционирует следующим образом. На основе заранее выбранной системы функций
![]() , которую генерирует блок
, которую генерирует блок
![]() , и априорной информации о
корреляционной функции
, и априорной информации о
корреляционной функции
![]() случайного
процесса
случайного
процесса
![]() блок
блок
![]() вырабатывает систему
функций
вырабатывает систему
функций
![]() в
соответствии с интегральным уравнением (2.29). Блок
в
соответствии с интегральным уравнением (2.29). Блок
![]() согласно выражению (2.28)
генерирует систему коэффициентов
согласно выражению (2.28)
генерирует систему коэффициентов
![]() , поступающих затем в вычислитель. В вычислитель
поступают также значения
, поступающих затем в вычислитель. В вычислитель
поступают также значения
![]() с
выходов интеграторов. На основе решения системы линейных уравнений (2.31)
относительно неизвестных коэффициентов
с
выходов интеграторов. На основе решения системы линейных уравнений (2.31)
относительно неизвестных коэффициентов
![]() вычислитель выдает их оценки
вычислитель выдает их оценки
![]() . С помощью оценок
коэффициентов
. С помощью оценок
коэффициентов
![]() и
системы функций
и
системы функций
![]() формируется
оценка квазидетерминированного сигнала
формируется
оценка квазидетерминированного сигнала
![]() согласно (2.23). Сформированная оценка
сигнала будет иметь временное запаздывание относительного истинного значения на
согласно (2.23). Сформированная оценка
сигнала будет иметь временное запаздывание относительного истинного значения на
![]() , необходимое
соответственно для вычисления случайных чисел
, необходимое
соответственно для вычисления случайных чисел
![]() и решения системы линейных уравнений в
вычислителе. С этой целью в структурной схеме предусмотрены блоки задержек на
время
и решения системы линейных уравнений в
вычислителе. С этой целью в структурной схеме предусмотрены блоки задержек на
время ![]() и
и
![]() .
.
Для белого шума
![]() и ортогональной системы
функций
и ортогональной системы
функций
![]() оптимальный
измеритель квазидетерминированного сигнала несколько упрощается, так как в этом
случае отпадает необходимость в вычислителе.
оптимальный
измеритель квазидетерминированного сигнала несколько упрощается, так как в этом
случае отпадает необходимость в вычислителе.
2.4. Результаты математического моделирования процесса обнаружения малозаметных объектов при моноимпульсной локации с оптимизацией частотно-временных характеристик лоцирующего импульса
В настоящем разделе будут приведены результаты численного моделирования работы адаптивной процедуры подстройки спектра сигнала, а также численные расчеты допустимого выигрыша в отношении сигнал/шум при сопровождении цели.
2.4.1. Численная модель отражения от цели: трансформация спектра сигнала.
Для математического моделирования процесса обнаружения малозаметных объектов с помощью моноимпульсной локации пространства мощными сверхширокополосными микроволновыми импульсами и для доказательства возможности практической реализации адаптивной процедуры подстройки спектра лоцирующего импульса был создан ряд программ на языке математических расчетов МАТЛАБ (см. Приложения 1-3). В программе расчета отраженного сигнала (Приложение 1) была реализована математическая модель отражения сверхширокополосных зондирующих импульсов от низкоотражающих покрытий. При этом предполагалось, что эффективная отражающая поверхность цели может иметь несколько характерных спектральных максимумов, в частном случае один, позволяющих провести моделирование работы адаптивной процедуры подстройки спектра лоцирующего импульса.
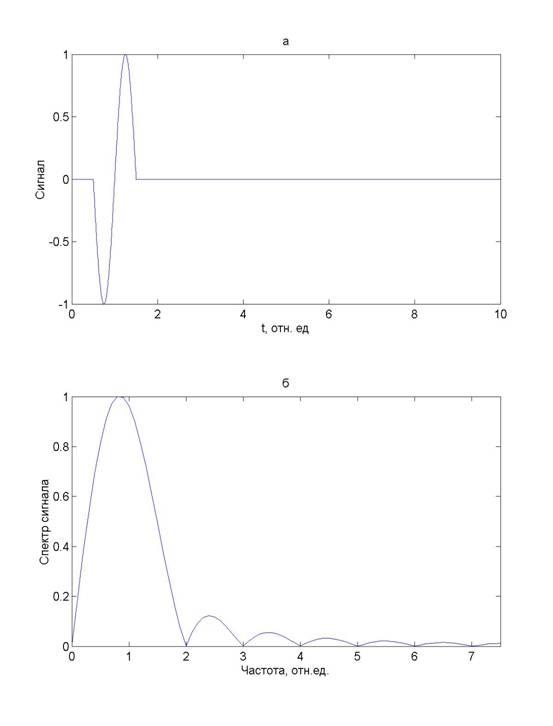
Рис. 2.4. Видеоимпульс (а) и его спектр (б), использованные для численного моделирования работы адаптивной процедуры подстройки спектра. Время нормировано на длительность одного периода, частота – на среднюю частоту спектра сигнала.
В качестве модели видеоимпульса было использовано синусоидальное колебание (рис. 2.4), состоящее из одного периода, причем длина периода была принята за единицу (все времена отсчитывались в долях периода исходного видеоимпульса). Общая длина отрезка моделирования в этом случае выбиралась равной 10 периодам. Радиоимпульс (рис. 2.5.) содержал 10 периодов синусоидальных колебаний, а общая длина отрезка моделирования была равна 50 периодам.
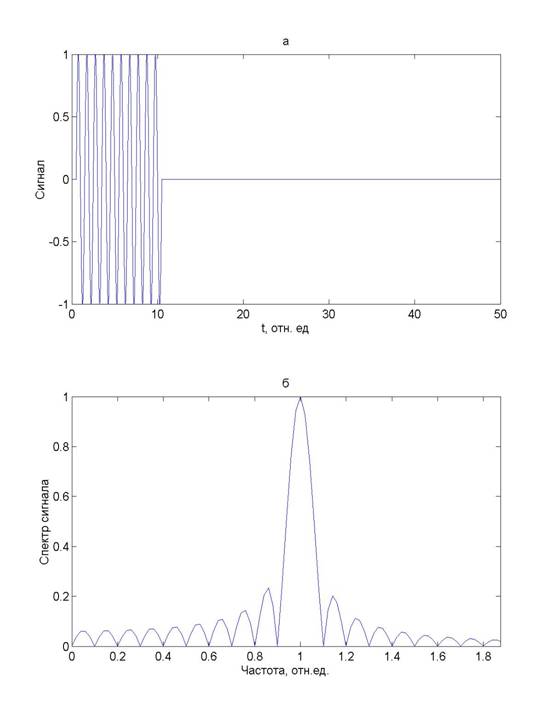
Рис. 2.5. Радиоимпульс (а) и его спектр (б), использованные для численного моделирования работы адаптивной процедуры подстройки спектра. Время нормировано на длительность одного периода, частота – на среднюю частоту спектра сигнала.
На рис. 2.4 и 2.5 представлены также спектры исходных видеоимпульса и радиоимпульса. Величина спектра нормирована для наглядности на максимальное значение, а частота нормирована на среднюю частоту сигнала. Такая нормировка позволяет единым образом описывать импульсы с различной средней частотой, делая результаты моделирования применимыми для различных практических ситуаций.
Рис. 2.6.
Принятые для численного
моделирования адаптивной подстройки спектра видеоимпульса зависимости
спектральной эффективной отражающей поверхности цели
![]() от
частоты: красная кривая – увеличение
от
частоты: красная кривая – увеличение
![]() на
пике в 2 раза, синяя кривая - увеличение
на
пике в 2 раза, синяя кривая - увеличение
![]() на
пике в 7.5 раза.
на
пике в 7.5 раза.
Для численного моделирования адаптивной
подстройки спектра сигнала были использованы представленные на рис. 2.6
зависимости спектральной эффективной отражающей поверхности цели
![]() от частоты. Отражение
лоцирующего импульса от цели моделировалось как прохождение импульса через
физически реализуемый линейный фильтр с постоянными параметрами (см.
(2.3)-(2.5)) с амплитудно-частотной характеристикой согласно
рис. 2.6. Кривая
от частоты. Отражение
лоцирующего импульса от цели моделировалось как прохождение импульса через
физически реализуемый линейный фильтр с постоянными параметрами (см.
(2.3)-(2.5)) с амплитудно-частотной характеристикой согласно
рис. 2.6. Кривая
![]() имела один максимум, причем
величина максимума была в одном случае в 2 раза больше среднего значения
эффективной отражающей поверхности цели (рис. 2.6, красная кривая), а в другом
– в 7.5 раз больше среднего значения (рис. 2.6, синяя кривая).
имела один максимум, причем
величина максимума была в одном случае в 2 раза больше среднего значения
эффективной отражающей поверхности цели (рис. 2.6, красная кривая), а в другом
– в 7.5 раз больше среднего значения (рис. 2.6, синяя кривая).
Видеоимпульсы, отраженные от цели (прошедшие
через линейный фильтр 2.6), представлены на рис. 2.7. Отметим, что изменение
формы импульса для
![]() несущественное,
в то время, как для
несущественное,
в то время, как для
![]() в
начале и конце импульса появляются спадающие колебания, означающие существенное
изменение спектрального состава импульса. Вид отраженного от цели радиоимпульса
представлен на рис. 2.8. Спектр радиоимпульса значительно уже спектра
видеоимпульса, поэтому радиоимпульс практически не меняет форму при прохождении
через линейный фильтр 2.6.
в
начале и конце импульса появляются спадающие колебания, означающие существенное
изменение спектрального состава импульса. Вид отраженного от цели радиоимпульса
представлен на рис. 2.8. Спектр радиоимпульса значительно уже спектра
видеоимпульса, поэтому радиоимпульс практически не меняет форму при прохождении
через линейный фильтр 2.6.
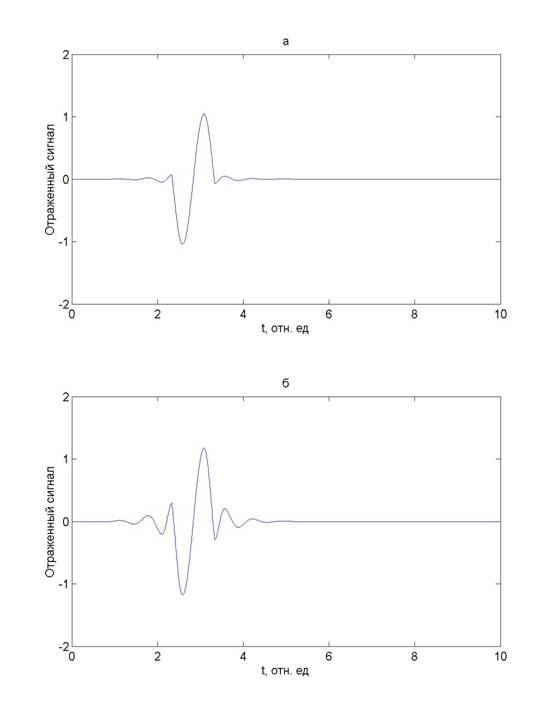
Рис. 2.7.
Вид отраженного от цели
видеоимпульса для
![]() (а) и
(а) и
![]() (б).
(б).
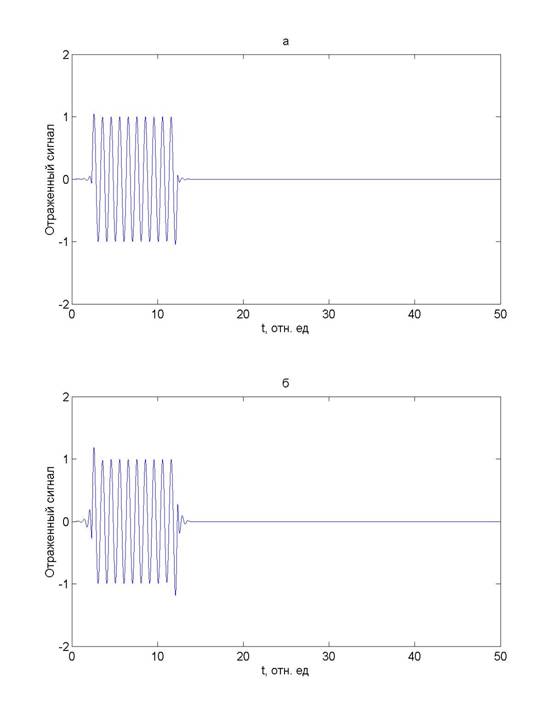
Рис. 2.8.
Вид
отраженного от цели радиоимпульса для
![]() (а)
и
(а)
и
![]() (б).
(б).
На рис. 2.9 представлена трансформация
спектра видеоимпульса при отражении от цели с
![]() . Левый спад кривой
. Левый спад кривой
![]() приходится на правую часть главного
лепестка спектра видеоимпульса, что приводит к подъему боковых лепестков
спектра относительно центрального. На рис. 2.10 трансформация спектра
видеоимпульса представлена для
приходится на правую часть главного
лепестка спектра видеоимпульса, что приводит к подъему боковых лепестков
спектра относительно центрального. На рис. 2.10 трансформация спектра
видеоимпульса представлена для
![]() . Здесь уже центральный лепесток спектра
отраженного сигнала становится двугорбым, а первый боковой максимум вырастает
почти в три раза по сравнению с исходным сигналом. Ширина главного лепестка
спектра сигнала выбрана сравнимой с шириной максимума спектральной эффективной
отражающей поверхности цели, что, очевидно, соответствует возможным
характеристикам максимумов
. Здесь уже центральный лепесток спектра
отраженного сигнала становится двугорбым, а первый боковой максимум вырастает
почти в три раза по сравнению с исходным сигналом. Ширина главного лепестка
спектра сигнала выбрана сравнимой с шириной максимума спектральной эффективной
отражающей поверхности цели, что, очевидно, соответствует возможным
характеристикам максимумов
![]() летательных аппаратов (средняя длина волны
видеоимпульса составляет 0.3-1.5 м).
летательных аппаратов (средняя длина волны
видеоимпульса составляет 0.3-1.5 м).
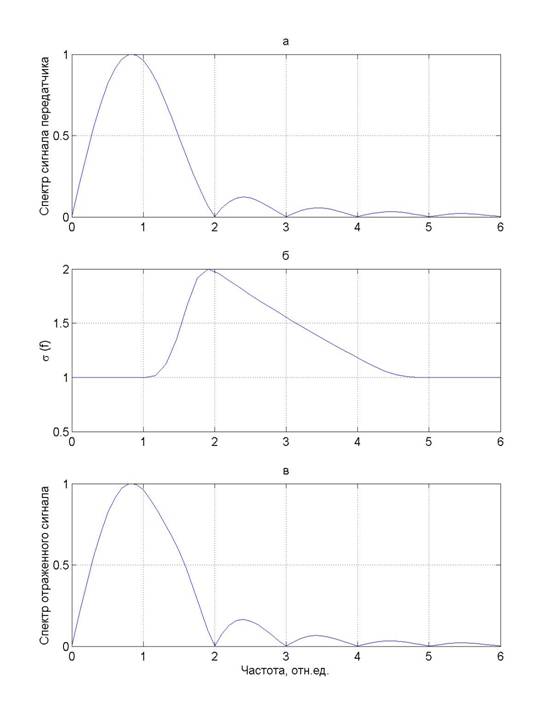
Рис. 2.9.
Трансформация спектра видеоимпульса при
отражении от цели
![]() :
:
а – спектр лоцирующего сигнала;
б – спектральная эффективная отражающая поверхность цели
![]() ;
;
в – спектр отраженного сигнала.
Спектры нормированы на свое максимальное значение,
![]() нормирована
на среднее значение.
нормирована
на среднее значение.
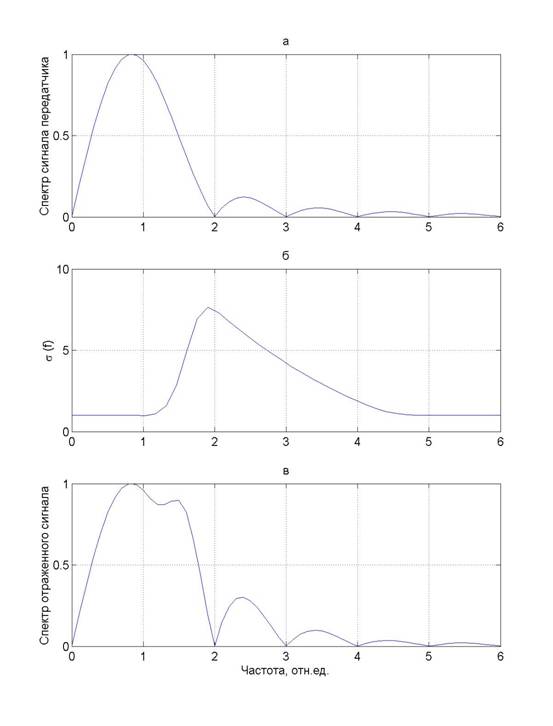
Рис. 2.10.
Трансформация спектра видеоимпульса при
отражении от цели
![]() :
:
а – спектр лоцирующего сигнала;
б – спектральная эффективная отражающая
поверхность цели
![]() ;
;
в – спектр отраженного сигнала.
Спектры нормированы на свое максимальное
значение,
![]() нормирована
на среднее значение.
нормирована
на среднее значение.
Трансформация спектра радиоимпульса
представлена на рис. 2.11 и 2.12. Как уже было отмечено, в силу относительно
небольшой ширины спектра сигнала форма спектра меняется незначительно. В случае
радиоимпульса ширина его спектра оказывается значительно меньше ширины спектра
эффективной отражающей поверхности цели
![]() (длина волны радиоимпульса порядка 3 см).
(длина волны радиоимпульса порядка 3 см).
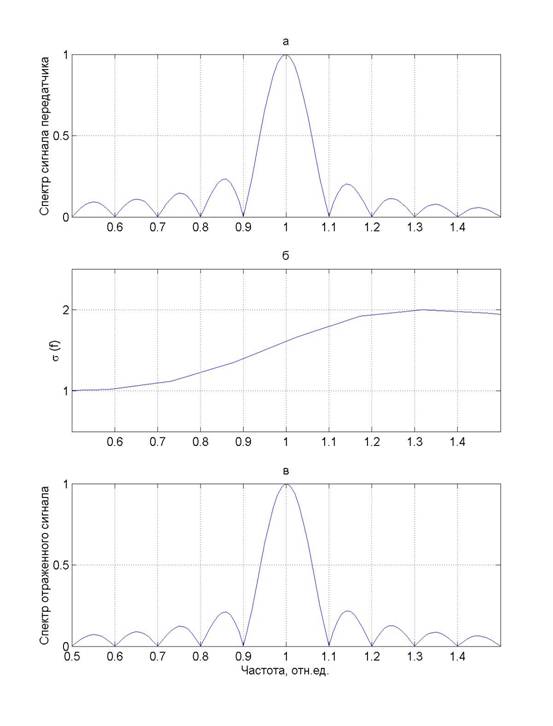
Рис. 2.11.
Трансформация спектра радиоимпульса при
отражении от цели
![]() :
:
а – спектр лоцирующего сигнала;
б – спектральная эффективная отражающая
поверхность цели
![]() ;
;
в – спектр отраженного сигнала.
Спектры нормированы на свое максимальное
значение,
![]() нормирована
на среднее значение.
нормирована
на среднее значение.
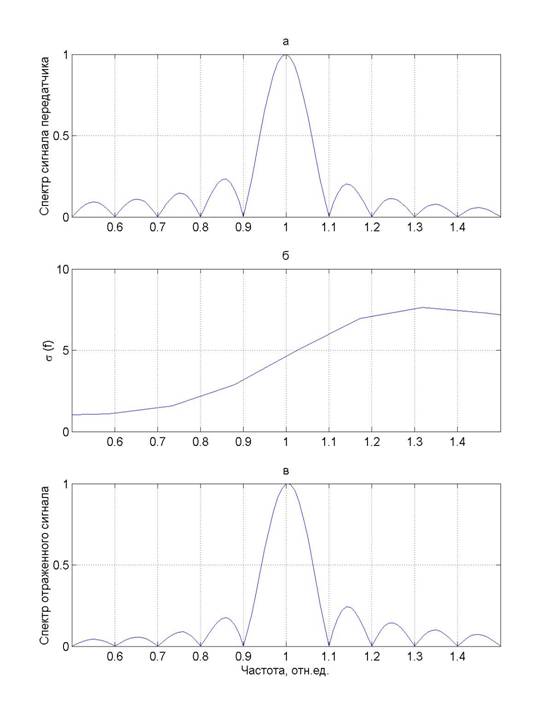
Рис. 2.12.
Трансформация спектра радиоимпульса при
отражении от цели
![]() :
:
а – спектр лоцирующего сигнала;
б – спектральная эффективная отражающая
поверхность цели
![]() ;
;
в – спектр отраженного сигнала.
Спектры нормированы на свое максимальное
значение,
![]() нормирована
на среднее значение.
нормирована
на среднее значение.
2.4.2. Реализация адаптивной процедуры по прямому расчету спектра отраженного сигнала.
Одним из
возможных способов оценки
![]() является оценка по спектру отраженного
сигнала, взвешенному на исходный спектр лоцирующего импульса (см. (2.5)).
является оценка по спектру отраженного
сигнала, взвешенному на исходный спектр лоцирующего импульса (см. (2.5)).
где
![]() - спектр лоцирующего сигнала, а
- спектр лоцирующего сигнала, а
![]() - спектр отраженного
сигнала. В отсутствие шумов такой метод мог бы позволить получать оценку
- спектр отраженного
сигнала. В отсутствие шумов такой метод мог бы позволить получать оценку
![]() во всем спектральном
диапазоне. Однако, шумы, поступающие на вход приемника, а также шумы самого
приемника не позволяют оценить вид спектра
во всем спектральном
диапазоне. Однако, шумы, поступающие на вход приемника, а также шумы самого
приемника не позволяют оценить вид спектра
![]() с произвольной точностью. Действительно,
спектр
с произвольной точностью. Действительно,
спектр
![]() содержит
шумовую составляющую согласно выражениям (2.11), (2.12). Поэтому в областях,
где
содержит
шумовую составляющую согласно выражениям (2.11), (2.12). Поэтому в областях,
где ![]() мало,
точность восстановления
мало,
точность восстановления
![]() будет
невысокой, причем чем меньше отношение сигнал/шум, тем хуже должна быть
точность оценки
будет
невысокой, причем чем меньше отношение сигнал/шум, тем хуже должна быть
точность оценки
![]() .
В этом смысле восстановление вида
.
В этом смысле восстановление вида
![]() по прямому расчету спектра отраженного
сигнала представляет собой типичную некорректную задачу.
по прямому расчету спектра отраженного
сигнала представляет собой типичную некорректную задачу.
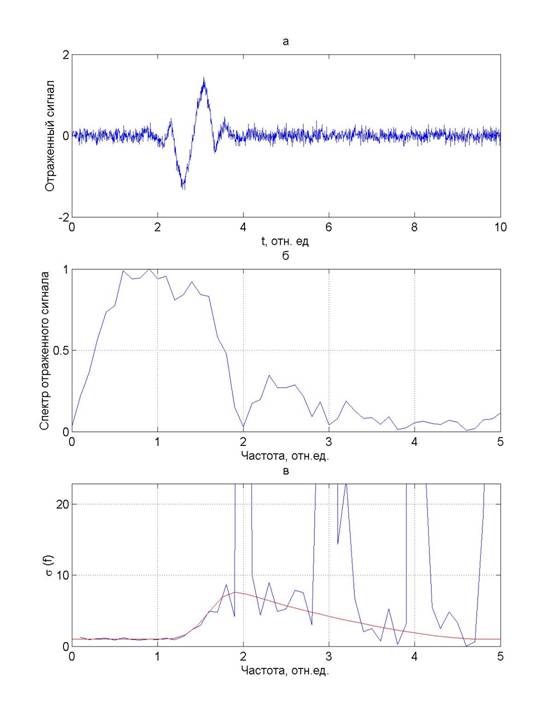
Рис. 2.13.
Видеоимпульс на выходе АЦП с учетом шумов при
отношении сигнал/шум
![]() (а),
спектр видеоимпульса (б) и восстановленная прямым расчетом по спектру
(а),
спектр видеоимпульса (б) и восстановленная прямым расчетом по спектру
![]() (в,
синяя кривая). Показана также исходная зависимость
(в,
синяя кривая). Показана также исходная зависимость
![]() (красная
кривая).
(красная
кривая).
Белый гауссовский шум в программе оценки спектральной эффективной отражающей поверхности по расчету спектра формировался с помощью генератора псевдослучайных чисел (см. Приложение 2). На рис. 2.13а представлен видеоимпульс, отраженный от цели и содержащий шумы (например, процесс на выходе АЦП) при отношении сигнал/шум, равном 100. Спектр такого видеоимпульса представлен на рис. 2.13б. Сравнивая рис. 2.13б и рис. 2.10в, можно заключить, что даже при относительно большом отношении сигнал/шум шумовая составляющая существенно меняет спектр отраженного сигнала.
На рис. 2.13в представлена характерная
зависимость
![]() ,
полученная прямым расчетом по спектрам отраженного и принятого сигналов
согласно выражению (2.45), для лоцирующего видеоимпульса, причем
,
полученная прямым расчетом по спектрам отраженного и принятого сигналов
согласно выражению (2.45), для лоцирующего видеоимпульса, причем
![]() . Зависимость
. Зависимость
![]() на
рис. 2.13в, полученная
прямым расчетом по спектру отраженного импульса, является случайной и меняется
для различных реализаций шума. Только область внутри главного лепестка имеет
малую погрешность восстановления, за пределами главного лепестка величина
ошибки оказывается чрезмерно большой. Так, в первом боковом лепестке ошибка
восстановления
на
рис. 2.13в, полученная
прямым расчетом по спектру отраженного импульса, является случайной и меняется
для различных реализаций шума. Только область внутри главного лепестка имеет
малую погрешность восстановления, за пределами главного лепестка величина
ошибки оказывается чрезмерно большой. Так, в первом боковом лепестке ошибка
восстановления
![]() оказывается
порядка 100 процентов (исключая нули спектра
оказывается
порядка 100 процентов (исключая нули спектра
![]() , где ошибка много больше).
, где ошибка много больше).
Для отношения сигнал/шум, равного 1000 (рис.
2.14), справедлив аналогичный вывод. Ошибка восстановления спектра
![]() в первом боковом лепестке
составляет порядка 30 процентов.
в первом боковом лепестке
составляет порядка 30 процентов.
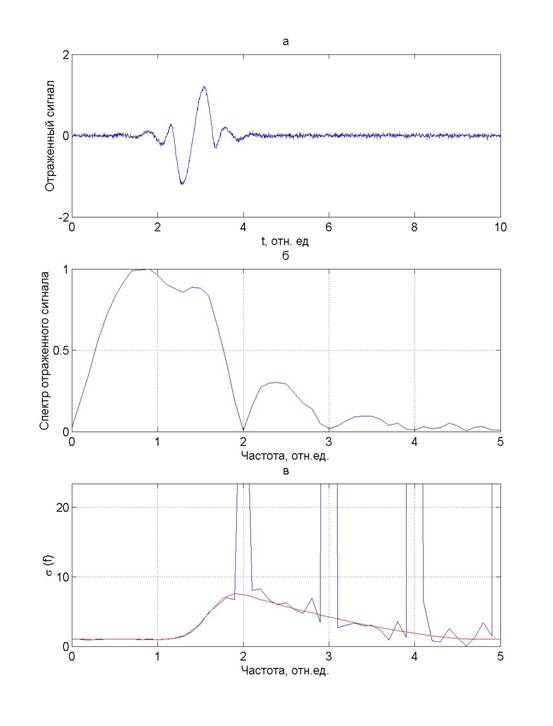
Рис. 2.14.
Видеоимпульс на выходе АЦП с учетом шумов при
отношении сигнал/шум
![]() (а),
спектр видеоимпульса (б) и восстановленная прямым расчетом по спектру
(а),
спектр видеоимпульса (б) и восстановленная прямым расчетом по спектру
![]() (в,
синяя кривая). Показана также исходная зависимость
(в,
синяя кривая). Показана также исходная зависимость
![]() (красная
кривая).
(красная
кривая).
Восстановление вида
![]() по прямому расчету спектра
отраженного сигнала имеет малую ошибку (10 процентов и менее) в широком
спектральном диапазоне, включающем 3-4 боковых лепестка, только при очень
большом отношении сигнал/шум
по прямому расчету спектра
отраженного сигнала имеет малую ошибку (10 процентов и менее) в широком
спектральном диапазоне, включающем 3-4 боковых лепестка, только при очень
большом отношении сигнал/шум
![]() (см. рис. 2.15). Очевидно, что такие
отношения сигнал/шум практически недостижимы в моноимпульсной локации. Таким
образом, оценка
(см. рис. 2.15). Очевидно, что такие
отношения сигнал/шум практически недостижимы в моноимпульсной локации. Таким
образом, оценка
![]() по
прямому расчету спектра отраженного видеоимпульса может быть использована
только внутри главного лепестка спектра лоцирующего сигнала, при этом
погрешность восстановления может быть не более 10 процентов. Положительным
фактором в этом случае является то, что оценка спектра оказывается несмещенной
(см. выражение (2.13)).
по
прямому расчету спектра отраженного видеоимпульса может быть использована
только внутри главного лепестка спектра лоцирующего сигнала, при этом
погрешность восстановления может быть не более 10 процентов. Положительным
фактором в этом случае является то, что оценка спектра оказывается несмещенной
(см. выражение (2.13)).
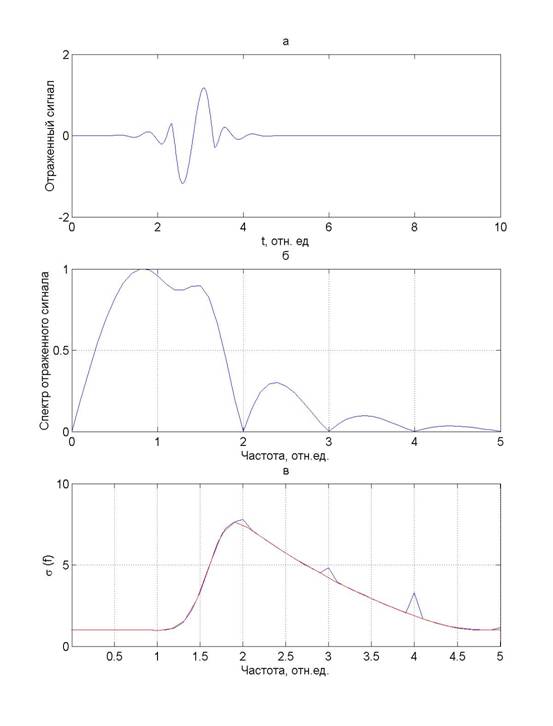
Рис. 2.15.
Видеоимпульс на выходе АЦП с учетом шумов при
отношении сигнал/шум
![]() (а),
спектр видеоимпульса (б) и восстановленная прямым расчетом по спектру
(а),
спектр видеоимпульса (б) и восстановленная прямым расчетом по спектру
![]() (в,
синяя кривая). Показана также исходная зависимость
(в,
синяя кривая). Показана также исходная зависимость
![]() (красная
кривая).
(красная
кривая).
Аналогичные выводы справедливы и при
зондировании пространства радиоимпульсами (рис. 2.16,
![]() и
2.17,
и
2.17,
![]() ).
).
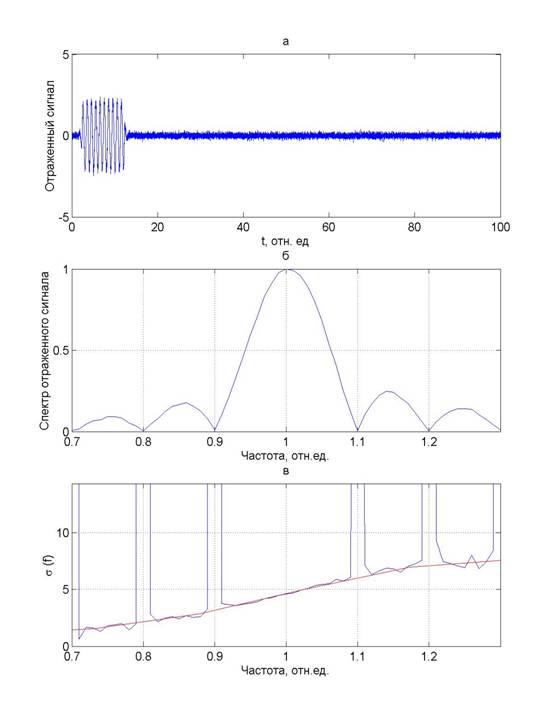
Рис. 2.16.
Радиоимпульс на выходе АЦП с учетом шумов при
отношении сигнал/шум
![]() (а),
спектр радиоимпульса (б) и восстановленная прямым расчетом по спектру
(а),
спектр радиоимпульса (б) и восстановленная прямым расчетом по спектру
![]() (в,
синяя кривая). Показана также исходная зависимость
(в,
синяя кривая). Показана также исходная зависимость
![]() (красная
кривая).
(красная
кривая).
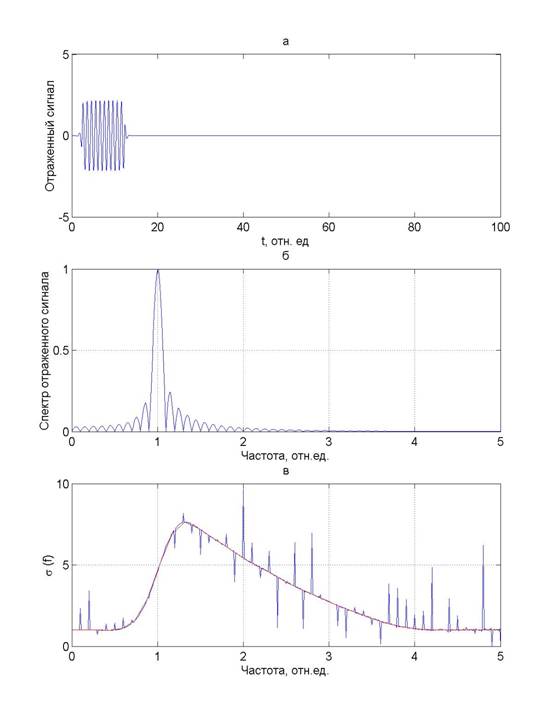
Рис. 2.17.
Радиоимпульс на выходе АЦП с учетом шумов при
отношении сигнал/шум
![]() (а),
спектр радиоимпульса (б) и восстановленная прямым расчетом по спектру
(а),
спектр радиоимпульса (б) и восстановленная прямым расчетом по спектру
![]() (в,
синяя кривая). Показана также исходная зависимость
(в,
синяя кривая). Показана также исходная зависимость
![]() (красная
кривая).
(красная
кривая).
2.4.3. Реализация адаптивной процедуры по фильтровому методу.
Одним из относительно несложных способов
регуляризации обратной задачи оценки спектра
![]() по отраженному сигналу является использование
цифровой разновидности фильтрового метода, описанного в разделе 2.3.2.
Программа реализации адаптивной процедуры по этому методу приведена в
Приложении 2. Основной идеей метода является усреднение спектров сигналов по
некоторому окну, в результате чего точки с нулевыми значениями спектра
исчезают. При увеличении ширины окна дисперсия оценки спектра уменьшается,
однако при этом смещение оценки, присущее фильтровому методу, увеличивается.
Таким образом, имеется оптимальная величина окна, обеспечивающая небольшую
дисперсию при приемлемом смещении оценки. Отметим, что максимальное количество
интервалов усреднения определяется величиной отношения сигнал/шум, так как,
вообще говоря, сигнал должен быть "виден" в каждом интервале усреднения, иначе
для оценок будет использоваться только шум.
по отраженному сигналу является использование
цифровой разновидности фильтрового метода, описанного в разделе 2.3.2.
Программа реализации адаптивной процедуры по этому методу приведена в
Приложении 2. Основной идеей метода является усреднение спектров сигналов по
некоторому окну, в результате чего точки с нулевыми значениями спектра
исчезают. При увеличении ширины окна дисперсия оценки спектра уменьшается,
однако при этом смещение оценки, присущее фильтровому методу, увеличивается.
Таким образом, имеется оптимальная величина окна, обеспечивающая небольшую
дисперсию при приемлемом смещении оценки. Отметим, что максимальное количество
интервалов усреднения определяется величиной отношения сигнал/шум, так как,
вообще говоря, сигнал должен быть "виден" в каждом интервале усреднения, иначе
для оценок будет использоваться только шум.
Для реализации адаптивной процедуры
подстройки спектра лоцирующего сигнала не требуется, вообще говоря, точное
восстановление вида
![]() во
всем спектральном диапазоне, достаточно лишь определить направление подстройки
частоты (увеличение или уменьшение), а затем продолжать процесс адаптации при
лоцировании последующими импульсами. В этом смысле достаточно оценить общий
характер кривой
во
всем спектральном диапазоне, достаточно лишь определить направление подстройки
частоты (увеличение или уменьшение), а затем продолжать процесс адаптации при
лоцировании последующими импульсами. В этом смысле достаточно оценить общий
характер кривой
![]() в
возможно более широком спектральном диапазоне.
в
возможно более широком спектральном диапазоне.
На рис. 2.18 представлены восстановленные с
помощью фильтрового метода оценки
![]() при лоцировании видеоимпульсом цели с
максимальным значением
при лоцировании видеоимпульсом цели с
максимальным значением
![]() ,
равным 7.5, и с отношением сигнал/шум, равным 100, для разного количества
интервалов усреднения m, приходящихся на главный
лепесток спектра сигнала передатчика – 2 (рис. 2.18а), 4 (рис. 2.18б), 7 (рис.
2.18в), 10 (рис. 2.18г) и 15 (рис. 2.18д). Для сравнения точное значение
спектра также изображено красной линией. Согласно вышесказанному, наиболее
гладкая восстановленная кривая
,
равным 7.5, и с отношением сигнал/шум, равным 100, для разного количества
интервалов усреднения m, приходящихся на главный
лепесток спектра сигнала передатчика – 2 (рис. 2.18а), 4 (рис. 2.18б), 7 (рис.
2.18в), 10 (рис. 2.18г) и 15 (рис. 2.18д). Для сравнения точное значение
спектра также изображено красной линией. Согласно вышесказанному, наиболее
гладкая восстановленная кривая
![]() получается в случае m=2,
однако смещение оценки оказывается в этом случае относительно большим. Для m=4 (рис. 2.18б) смещение оценки получается уже значительно
меньшим, в то же время характер кривой
получается в случае m=2,
однако смещение оценки оказывается в этом случае относительно большим. Для m=4 (рис. 2.18б) смещение оценки получается уже значительно
меньшим, в то же время характер кривой
![]() правильно передается в главном и первом
боковом лепестках. Для m, равного 7, 10 и 15, дисперсия
ошибки оценки в первом боковом лепестке оказывается большой. Таким образом, для
правильно передается в главном и первом
боковом лепестках. Для m, равного 7, 10 и 15, дисперсия
ошибки оценки в первом боковом лепестке оказывается большой. Таким образом, для
![]() оптимальное
количество интервалов усреднения оказывается порядка 3-5.
оптимальное
количество интервалов усреднения оказывается порядка 3-5.
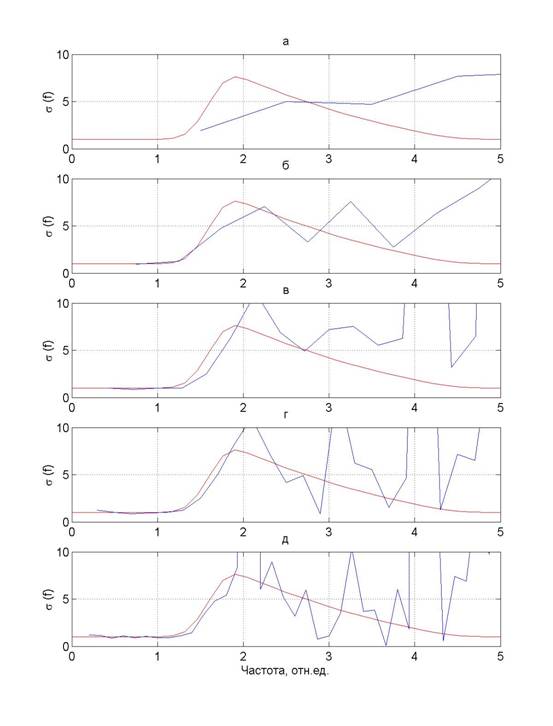
Рис. 2.18.
Восстановленная с помощью усреднения по спектру
![]() (синяя
кривая) при отношении сигнал/шум
(синяя
кривая) при отношении сигнал/шум
![]() и
исходная зависимость
и
исходная зависимость
![]() (красная
кривая): а – число интервалов усреднения спектра
m,
приходящихся на ширину главного лепестка спектра сигнала, равно 2; б –
m=4;
в - m=7;
г - m=10;
д - m=15.
Относительная высота максимума
(красная
кривая): а – число интервалов усреднения спектра
m,
приходящихся на ширину главного лепестка спектра сигнала, равно 2; б –
m=4;
в - m=7;
г - m=10;
д - m=15.
Относительная высота максимума
![]() равна
7.5.
равна
7.5.
На рис. 2.19 представлены аналогичные кривые
для отношения сигнал/шум, равного 1000. Здесь уже при усреднении по 4
интервалам (m=4) внутри главного лепестка спектра
![]() диапазон относительно
точного восстановления простирается до 5 бокового лепестка. Для m=7 и m=10 смещение оценки
оказывается еще меньше, чем для m=4, при этом дисперсия
тоже невелика в главном и первом боковом лепестке спектра, что позволяет в этом
случае использовать в адаптивной процедуре 10 интервалов усреднения внутри
главного лепестка.
диапазон относительно
точного восстановления простирается до 5 бокового лепестка. Для m=7 и m=10 смещение оценки
оказывается еще меньше, чем для m=4, при этом дисперсия
тоже невелика в главном и первом боковом лепестке спектра, что позволяет в этом
случае использовать в адаптивной процедуре 10 интервалов усреднения внутри
главного лепестка.
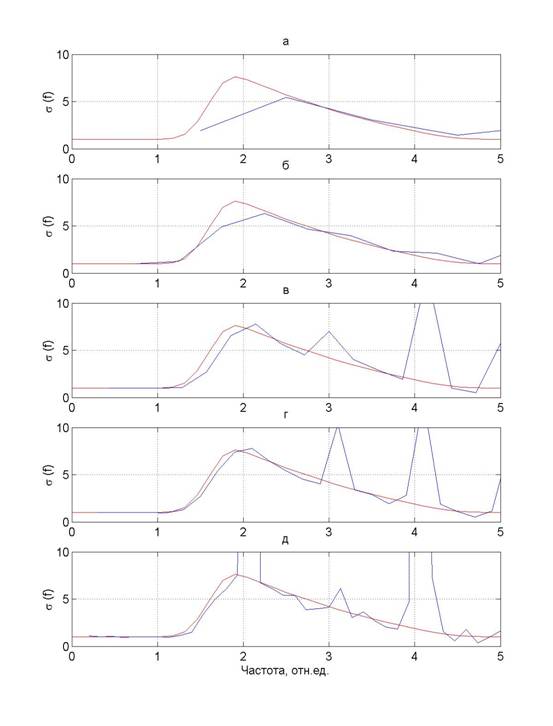
Рис. 2.19.
Восстановленная с помощью усреднения по спектру
![]() (синяя
кривая) при отношении сигнал/шум
(синяя
кривая) при отношении сигнал/шум
![]() и
исходная зависимость
и
исходная зависимость
![]() (красная
кривая): а – число интервалов усреднения спектра
m,
приходящихся на ширину главного лепестка спектра сигнала, равно 2; б –
m=4;
в - m=7;
г - m=10;
д - m=15.
Относительная высота максимума
(красная
кривая): а – число интервалов усреднения спектра
m,
приходящихся на ширину главного лепестка спектра сигнала, равно 2; б –
m=4;
в - m=7;
г - m=10;
д - m=15.
Относительная высота максимума
![]() равна
7.5.
равна
7.5.
Соответствующие кривые для оценки спектра с
![]() приведены на рис.
2.20 и 2.21. Все сказанное выше про оценки спектра с
приведены на рис.
2.20 и 2.21. Все сказанное выше про оценки спектра с
![]() приложимо и в этом случае. Однако в целом
дисперсии ошибок оценок оказываются здесь несколько большими, чем на рис.
2.18
и 2.19.
приложимо и в этом случае. Однако в целом
дисперсии ошибок оценок оказываются здесь несколько большими, чем на рис.
2.18
и 2.19.
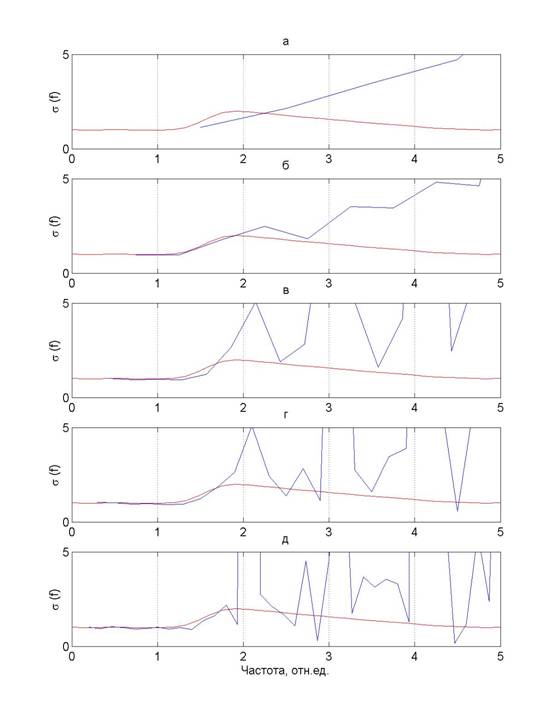
Рис. 2.20.
Восстановленная с помощью усреднения по спектру
![]() (синяя
кривая) при отношении сигнал/шум
(синяя
кривая) при отношении сигнал/шум
![]() и
исходная зависимость
и
исходная зависимость
![]() (красная
кривая): а – число интервалов усреднения спектра
m,
приходящихся на ширину главного лепестка спектра сигнала, равно 2; б –
m=4;
в - m=7;
г - m=10;
д - m=15.
Относительная высота максимума
(красная
кривая): а – число интервалов усреднения спектра
m,
приходящихся на ширину главного лепестка спектра сигнала, равно 2; б –
m=4;
в - m=7;
г - m=10;
д - m=15.
Относительная высота максимума
![]() равна
2.
равна
2.
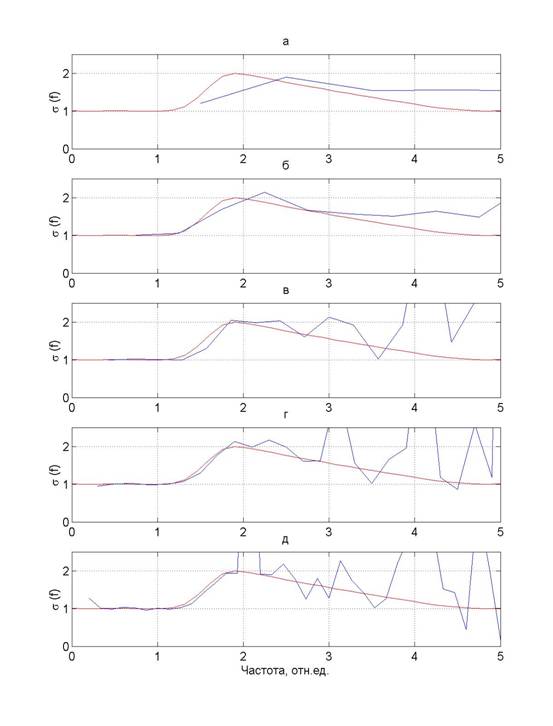
Рис. 2.21.
Восстановленная с помощью усреднения по спектру
![]() (синяя
кривая) при отношении сигнал/шум
(синяя
кривая) при отношении сигнал/шум
![]() и
исходная зависимость
и
исходная зависимость
![]() (красная
кривая): а – число интервалов усреднения спектра
m,
приходящихся на ширину главного лепестка спектра сигнала, равно 2; б –
m=4;
в - m=7;
г - m=10;
д - m=15.
Относительная высота максимума
(красная
кривая): а – число интервалов усреднения спектра
m,
приходящихся на ширину главного лепестка спектра сигнала, равно 2; б –
m=4;
в - m=7;
г - m=10;
д - m=15.
Относительная высота максимума
![]() равна
2.
равна
2.
На рис. 2.22 – 2.25 приведены аналогичные кривые восстановления спектра по отраженному радиоимпульсу. Характерным отличием этих кривых от восстановления по видеоимпульсу оказывается меньшее оптимальное количество интервалов фильтрации – практически во всех случаях и дисперсия ошибки, и смещение оценки для m=2 и m=4 оказываются меньше, чем для m=7 и m=10. Таким образом, в этом случае достаточно 2-3 интервалов усреднения на ширине главного лепестка спектра.
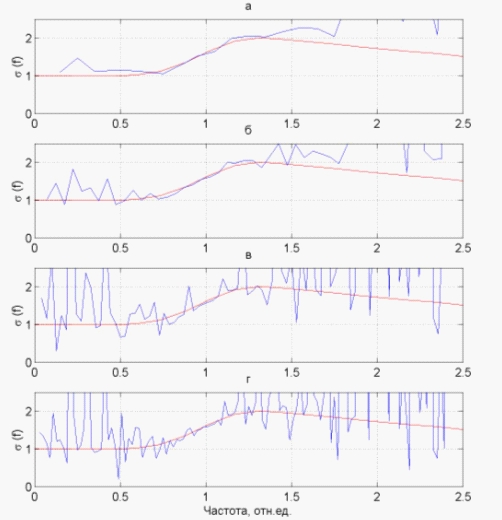
Рис. 2.22.
Восстановленная с помощью усреднения по спектру
![]() (синяя
кривая) при отношении сигнал/шум
(синяя
кривая) при отношении сигнал/шум
![]() и
исходная зависимость
и
исходная зависимость
![]() (красная
кривая): а – число интервалов усреднения спектра
m,
приходящихся на ширину главного лепестка спектра сигнала, равно 2; б –
m=4;
в - m=7;
г - m=10.
Радиосигнал, относительная высота максимума
(красная
кривая): а – число интервалов усреднения спектра
m,
приходящихся на ширину главного лепестка спектра сигнала, равно 2; б –
m=4;
в - m=7;
г - m=10.
Радиосигнал, относительная высота максимума
![]() равна
2.
равна
2.
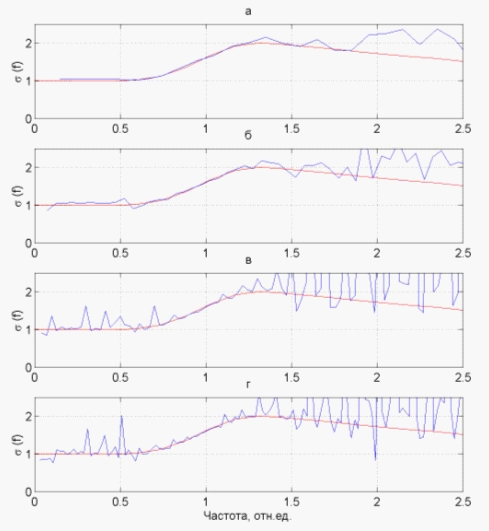
Рис. 2.23.
Восстановленная с помощью усреднения по спектру
![]() (синяя
кривая) при отношении сигнал/шум
(синяя
кривая) при отношении сигнал/шум
![]() и
исходная зависимость
и
исходная зависимость
![]() (красная
кривая): а – число интервалов усреднения спектра
m,
приходящихся на ширину главного лепестка спектра сигнала, равно 2; б –
m=4;
в - m=7;
г - m=10.
Радиосигнал, относительная высота максимума
(красная
кривая): а – число интервалов усреднения спектра
m,
приходящихся на ширину главного лепестка спектра сигнала, равно 2; б –
m=4;
в - m=7;
г - m=10.
Радиосигнал, относительная высота максимума
![]() равна
2.
равна
2.
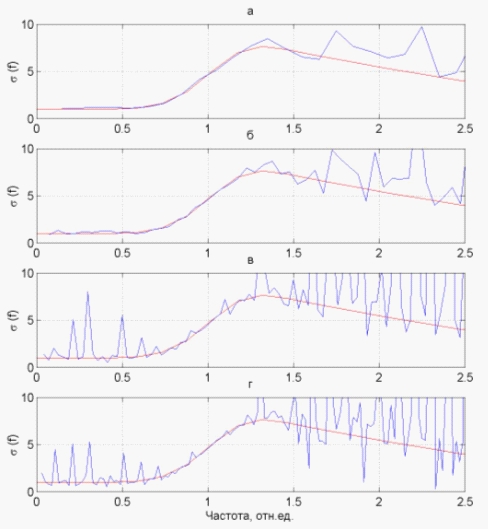
Рис. 2.24.
Восстановленная с помощью усреднения по спектру
![]() (синяя
кривая) при отношении сигнал/шум
(синяя
кривая) при отношении сигнал/шум
![]() и
исходная зависимость
и
исходная зависимость
![]() (красная
кривая): а – число интервалов усреднения спектра
m,
приходящихся на ширину главного лепестка спектра сигнала, равно 2; б –
m=4;
в - m=7;
г - m=10.
Радиосигнал, относительная высота максимума
(красная
кривая): а – число интервалов усреднения спектра
m,
приходящихся на ширину главного лепестка спектра сигнала, равно 2; б –
m=4;
в - m=7;
г - m=10.
Радиосигнал, относительная высота максимума
![]() равна
7.5.
равна
7.5.
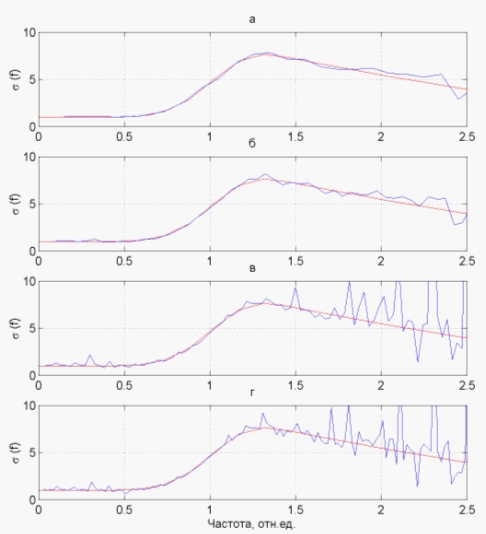
Рис. 2.25.
Восстановленная с помощью усреднения по спектру
![]() (синяя
кривая) при отношении сигнал/шум
(синяя
кривая) при отношении сигнал/шум
![]() и
исходная зависимость
и
исходная зависимость
![]() (красная
кривая): а – число интервалов усреднения спектра
m,
приходящихся на ширину главного лепестка спектра сигнала, равно 2; б –
m=4;
в - m=7;
г - m=10.
Радиосигнал, относительная высота максимума
(красная
кривая): а – число интервалов усреднения спектра
m,
приходящихся на ширину главного лепестка спектра сигнала, равно 2; б –
m=4;
в - m=7;
г - m=10.
Радиосигнал, относительная высота максимума
![]() равна
7.5.
равна
7.5.
Подводя итог сказанному выше, можно сделать вывод, что цифровая реализация фильтрового метода позволяет получать оценку спектральной эффективной отражающей поверхности цели уже при 7-10 интервалах усреднения, при этом дисперсия оценки оказывается малой внутри главного лепестка спектра лоцирующего сигнала.
2.4.4. Возможное увеличение отношения сигнал/шум при реализации адаптивной процедуры.
В разделе 2.2.2 было аналитически оценено увеличение отношения сигнал/шум при проведении адаптивной процедуры подстройки спектра лоцирующего сигнала. При этом предполагалось, что весь спектр лоцирующего импульса сосредоточен вблизи максимума спектральной эффективной отражающей поверхности цели. В настоящем разделе из численного моделирования будет получено значение отношения сигнал/шум для различной ширины спектра лоцирующего импульса.
Программа численного расчета отношения
сигнал/шум на языке инженерных расчетов МАТЛАБ представлена в Приложении 3.
Отношение сигнал/шум определялось на выходе квазиоптимального полосового
фильтра с полосой, равной ширине главного лепестка спектра сигнала. Для
сравнения характеристик лоцирующих импульсов с разной длительностью применялась
нормировка на полную энергию сигнала посылки. Отношение сигнал/шум для
![]() приведено на
рис. 2.26б,
а для
приведено на
рис. 2.26б,
а для
![]() - на
рис.
2.27б. Для одного периода в цуге выигрыш в отношении сигнал/шум от применения
адаптивной процедуры оказывается самым малым – не более 5 при
- на
рис.
2.27б. Для одного периода в цуге выигрыш в отношении сигнал/шум от применения
адаптивной процедуры оказывается самым малым – не более 5 при
![]() и не более 1.7 при
и не более 1.7 при
![]() . Это связано с тем, что
ширина спектра такого импульса оказывается порядка ширины спектра
. Это связано с тем, что
ширина спектра такого импульса оказывается порядка ширины спектра
![]() , поэтому смещение импульса
по частоте относительно мало изменяет перекрытие спектров импульса и
, поэтому смещение импульса
по частоте относительно мало изменяет перекрытие спектров импульса и
![]() . Наибольшее увеличение
отношения сигнал/шум получается для узкополосных цугов, содержащих несколько
периодов. Практически уже при 4-5 периодах в цуге отношение сигнал/шум
достигает своего максимального значения вблизи максимума спектра
. Наибольшее увеличение
отношения сигнал/шум получается для узкополосных цугов, содержащих несколько
периодов. Практически уже при 4-5 периодах в цуге отношение сигнал/шум
достигает своего максимального значения вблизи максимума спектра
![]() и не растет при дальнейшем
увеличении количества периодов в цуге (для выбранной модели спектральной
эффективной отражающей поверхности цели
и не растет при дальнейшем
увеличении количества периодов в цуге (для выбранной модели спектральной
эффективной отражающей поверхности цели
![]() ). Для большого удаления от максимума спектра
). Для большого удаления от максимума спектра
![]() большее отношение сигнал/шум
получается, наоборот, для широкополосных лоцирующих сигналов, так как в этом
случае перекрытие спектров уменьшается медленнее. В целом зависимость отношения
сигнал/шум от частоты лоцирующего сигнала напоминает вид зависимости
большее отношение сигнал/шум
получается, наоборот, для широкополосных лоцирующих сигналов, так как в этом
случае перекрытие спектров уменьшается медленнее. В целом зависимость отношения
сигнал/шум от частоты лоцирующего сигнала напоминает вид зависимости
![]() .
.
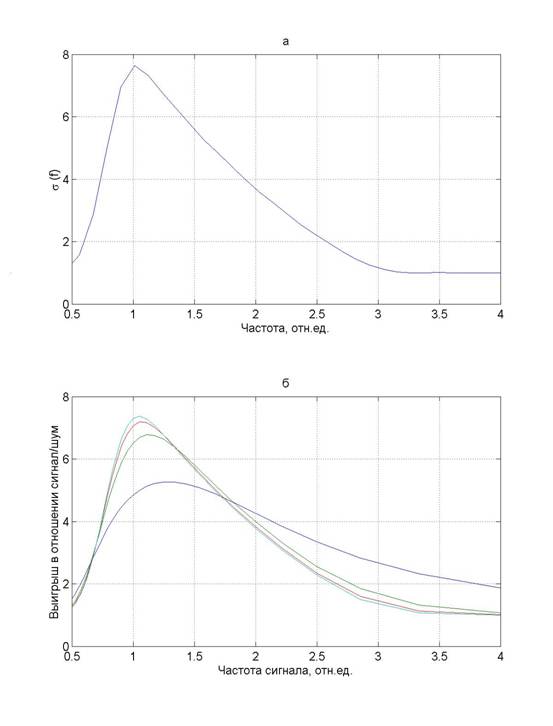
Рис. 2.26.
Вид
![]() (а)
и выигрыш в отношении сигнал/шум при адаптивной подстройке длительности
лоцирующего импульса и числа периодов в цуге (б): синяя кривая – один период в
цуге; зеленая кривая - два периода в цуге; красная кривая – три периода в цуге;
светло-зеленая кривая – четыре периода в цуге; при дальнейшем увеличении числа
периодов отношение сигнал/шум не растет. Относительная высота максимума
(а)
и выигрыш в отношении сигнал/шум при адаптивной подстройке длительности
лоцирующего импульса и числа периодов в цуге (б): синяя кривая – один период в
цуге; зеленая кривая - два периода в цуге; красная кривая – три периода в цуге;
светло-зеленая кривая – четыре периода в цуге; при дальнейшем увеличении числа
периодов отношение сигнал/шум не растет. Относительная высота максимума
![]() равна
7.5.
равна
7.5.
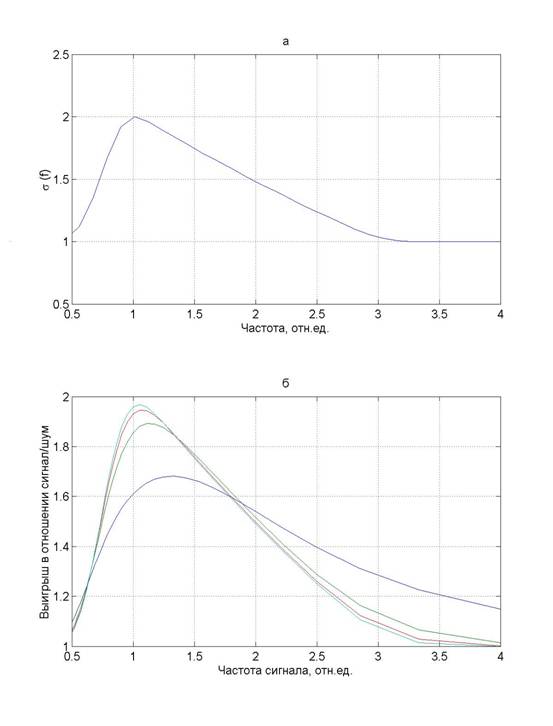
Рис. 2.27.
Вид
![]() (а)
и выигрыш в отношении сигнал/шум при адаптивной подстройке длительности
лоцирующего импульса и числа периодов в цуге (б): синяя кривая – один период в
цуге; зеленая кривая - два периода в цуге; красная кривая – три периода в цуге;
светло-зеленая кривая – четыре периода в цуге; при дальнейшем увеличении числа
периодов отношение сигнал/шум не растет. Относительная высота максимума
(а)
и выигрыш в отношении сигнал/шум при адаптивной подстройке длительности
лоцирующего импульса и числа периодов в цуге (б): синяя кривая – один период в
цуге; зеленая кривая - два периода в цуге; красная кривая – три периода в цуге;
светло-зеленая кривая – четыре периода в цуге; при дальнейшем увеличении числа
периодов отношение сигнал/шум не растет. Относительная высота максимума
![]() равна
2.
равна
2.
Таким образом, наиболее эффективно для начального этапа адаптации использовать максимально короткие лоцирующие импульсы (сигналы с максимально широким спектром), увеличивая затем длину периода при необходимости и количество периодов в цуге. В этом случае оказывается возможным получить выигрыш в отношении сигнал/шум, близкий к теоретическому (см. рис. 2.26, 2.27 и выражения (2.6), (2.9)).
Для эффективной работы адаптационной
процедуры требуется довольно большое отношение сигнал/шум 100-1000 и более.
Обеспечить такое отношение сигнал/шум при лоцировании одиночным импульсом не
всегда представляется возможным. В этом случае можно использовать ограниченную
пачку импульсов. Так, если отношение сигнал/шум при локации одиночным импульсом
равно 10, что недостаточно для работы адаптивной процедуры, то при
использовании пачки из 100 импульсов отношение сигнал/шум возрастает до 1000, а
этого уже вполне достаточно для подстройки спектра лоцирующего сигнала. Важной
особенностью моноимпульсной локации ограниченной пачкой импульсов в этом случае
является то, что здесь не требуется когерентного накопления всех импульсов
пачки, как при оценке параметров цели. Действительно, можно усреднять уже
непосредственно оценки спектра
![]() , полученные при обработке каждого импульса.
Таким образом, практическая реализация адаптивной процедуры при моноимпульсной
локации ограниченной пачкой импульсов оказывается не сложнее случая
моноимпульсной локации одиночным импульсом. Стратегия подстройки спектра в этом
случае может заключаться в первоначальном облучении цели пачкой широкополосных
импульсом, определении характеристик
, полученные при обработке каждого импульса.
Таким образом, практическая реализация адаптивной процедуры при моноимпульсной
локации ограниченной пачкой импульсов оказывается не сложнее случая
моноимпульсной локации одиночным импульсом. Стратегия подстройки спектра в этом
случае может заключаться в первоначальном облучении цели пачкой широкополосных
импульсом, определении характеристик
![]() , а затем переход к локации одиночными
импульсами с оптимизированным спектром (или более короткой пачкой импульсов).
, а затем переход к локации одиночными
импульсами с оптимизированным спектром (или более короткой пачкой импульсов).
Отметим, наконец, что адаптивная процедура позволяет оптимизировать спектр лоцирующего импульса не только по отношению к спектральным характеристикам цели, но и по отношению к условиям распространения импульса на трассе. Действительно, максимизируется значение отраженного сигнала на входе приемника, а эта величина зависит как от условий отражения от цели, так и от условий прохождения импульса до цели и обратно.
Предложена адаптивная процедура подстройки спектра лоцирующего импульса в соответствии с частотными диапазонами максимального значения эффективной отражающей поверхности объекта. В результате локации цели широкополосным импульсом по спектру отраженного сигнала определяются частоты, на которых эффективная отражающая поверхность цели принимает максимальное значение. Спектр излучаемого сигнала перестраивается так, чтобы его основная энергия содержалась вблизи этих частот. Применение такой процедуры позволяет улучшить точность определения параметров цели без соответствующего увеличения мощности передатчика, причем выигрыш в определенных случаях может быть в несколько раз.
Проанализированы алгоритмы определения частотных диапазонов с максимальным значением спектральных амплитуд эффективной отражающей поверхности цели, позволяющие реализовать адаптивную процедуру подстройки спектра лоцирующего импульса и улучшить характеристики оценки параметров цели. Определена относительная ошибка измерения спектра отраженного импульса, которая оказывается обратно пропорциональной корню квадратному из отношения сигнал/шум. Показано, что для эффективной работы адаптационной процедуры требуются отношения сигнал/шум не менее нескольких десятков. Аналитические результаты проверены с помощью численного моделирования.
Наиболее полно потенциальные возможности адаптивной процедуры могут быть реализованы в случае моноимпульсного локатора, имеющего в своем составе как генератор видеоимпульсов с перестраиваемой частотой, так и генератор радиоимпульсов также с перестраиваемой частотой (или соответствующие линейки генераторов с фиксированными частотами), что позволит оптимальным образом подстраивать спектр лоцирующего сигнала и максимально точно сопровождать цель.
1. В. И. Тихонов. Статистическая радиотехника, М., "Радио и Связь", 1982.
2. Б. Р. Левин. Теоретические основы статистической радиотехники, М., "Советское радио", 1969, т. 1 и 2.
3. Ж. Макс. Методы и техника обработки сигналов при физических измерениях, М., Мир, 1983, т. 1 и 2.
4. Ю. И. Грибанов, В. Л. Мальков. Выборочные оценки спектральных характеристик стационарных случайных процессов, М., Энергия, 1978.
5. Дж. Бендат, А. Пирсол. Измерение и анализ случайных процессов, М., Мир, 1974.
6. Е. И. Куликов. Методы измерения случайных процессов, М., "Радио и связь", 1986.
7. С. А. Ахманов, Ю. Е. Дьяков, А. С. Чиркин. Введение в статистическую радиофизику и оптику, М., Наука, 1981.
8. С. М. Рытов. Введение в статистическую радиофизику, М., Наука, 1976, т. 1, Случайные процессы.
9. Е. И. Куликов, А. П. Трифонов. Оценка параметров сигналов на фоне помех, М., "Советское радио", 1978.
10. Ю. Г. Сосулин. Теория обнаружения и оценивания стохастических сигналов, М., "Советское радио", 1978.
11. Г. Ван Трис. Теория обнаружения, оценок и модуляции, М., "Советское радио", 1972, т. 1.