Многоточечная модель объекта локации сложной формы на фоне подстилающей поверхности
А. Б. Борзов
Проблема определения направления, в котором устанавливается ось антенной системы РЛС при сопровождении цели, расположенной на фоне подстилающей поверхности, представляет значительный интерес при проектировании и оценке потенциальных характеристик, в - частности, бортовых угломерных радиолокационных систем. Эта задача возникает при определении положения в пространстве радиолокационных целей, которые в большинстве случаев являются сложными, как, например, танки на фоне подстилающей поверхности. Обычно, при рассмотрении принципов работы различных систем радиолокационного сопровождения считается, что цель является точечной [1-5]. Это, однако, справедливо лишь для больших расстояний до цели. Наиболее правильно при описании целей, таких, как танки, учитывать их конечные размеры.
В данном разделе считается, что сигнал от сложной цели представляет совокупность парциальных сигналов (отражений) от группы точечных целей, характеризующих основные отражающие элементы цели. Остальные участки цели не учитываются. Так как результаты анализа не зависят от конфигурации расположения точек, то они могут быть применены и к другим случаям, если выбрать необходимое число точек.
В большинстве работ такая модель используется для статистического описания цели [1-3]. Различные фазовые соотношения между сигналами, отраженными от отдельных элементов, приводят к появлению в РЛС шумов цели. При статистическом подходе предполагается, что цель можно представить в виде совокупности достаточно большого количества случайных отражателей с независимыми амплитудами и фазами отраженных от них сигналов. В частности, в [1] показано, что при этом достаточно наложить условие независимости сигналов по фазе. Это приемлемо уже при 5 - 6 отражателях, имеющих примерно равные ЭПР.
Однако, как отмечалось в [2-3], такая модель не полностью соответствует цели, например, танку, так как все особенности отраженного сигнала можно отобразить моделью из большего числа отражателей, чем 5. Амплитуды отраженных сигналов в этом случае могут быть и не равными и наибольшие проблемы учета шумовых воздействий из-за колебаний направления прихода сигнала ("углового шума").
1. Радиолокационный центр цели.
Будем полагать, что цель находится в квазистатическом состоянии, т.е. координатор цели (КЦ) системы измерения угловых координат является достаточно быстродействующей, чтобы осуществлять слежение за "точкой равновесия" цели, координаты которой в картинной плоскости локации "n"-точечной цели для любого типа КЦ (моноимпульсный, коническое сканирование, … ) могут быть получены в виде [6-7]
Здесь
![]() и
и
![]() - амплитуда и фаза сигнала отраженного "n"-ой точкой цели, имеющей
координаты в картинной плоскости
- амплитуда и фаза сигнала отраженного "n"-ой точкой цели, имеющей
координаты в картинной плоскости
![]() .
.
Среднюю точку
равновесия
![]() определяется
как точку равновесия в случае, когда сигналы от всех отражателей находятся в
фазе. В этом случае
определяется
как точку равновесия в случае, когда сигналы от всех отражателей находятся в
фазе. В этом случае
 ,
,
 (2)
(2)
Ясно, что эта средняя точка или средний радиолокационный центр цели сравнительно мало подвижна и всегда находится в пределах цели, хорошо определяя ее положение. Ошибка наведения оценивается относительно значений (1) и (2)
Предел ошибки наведения по одной из координат, например x, можно оценить [2]
где Lx- протяженность цели в направлении оси х, Е – амплитуда относительной величины сигнала, отраженного от "n"-точечной цели, значение которого величина определяется из соотношения
2. Радиолокационные характеристики многоточечной модели объекта локации на фоне подстилающей поверхности.
Проблема выбора оптимальной формы элементов конструкции цели, рациональное размещение на ее поверхности радиопоглощающих материалов, а также синтез многоточечной модели радиолокационной цели типа танк, расположенной на фоне подстилающей поверхности требуют определения локальных радиолокационных характеристик (РЛХ) элементов конструкции цели сложной формы и локальных характеристик подстилающих поверхностей, которую можно представить в виде
где N -
число конструктивных элементов цели, ![]() - координаты фазового центра рассеяния
k-го элемента цели, либо участка подстилающей поверхности. Fn -
величина, пропорциональная ЭПР, определяющая вклад отдельного элемента в общем
поле рассеяния [8]. При этом
- координаты фазового центра рассеяния
k-го элемента цели, либо участка подстилающей поверхности. Fn -
величина, пропорциональная ЭПР, определяющая вклад отдельного элемента в общем
поле рассеяния [8]. При этом
 . (5)
. (5)
Здесь
![]() - функция распределения
источников вторичных волн на поверхности цели;
- функция распределения
источников вторичных волн на поверхности цели;
![]() - радиус-вектор точки на поверхности цели;
- радиус-вектор точки на поверхности цели;
![]() - угловые
координаты положений приемной и передающей антенн относительно цели,
соответственно; Sn -
поверхность "n"-го элемента цели;
- угловые
координаты положений приемной и передающей антенн относительно цели,
соответственно; Sn -
поверхность "n"-го элемента цели;
![]() - угловые области изменения
ракурсов приемной и передающей антенн соответственно;
- угловые области изменения
ракурсов приемной и передающей антенн соответственно;
![]() - априорная плотность распределения
вероятностей ракурсов локации цели.
- априорная плотность распределения
вероятностей ракурсов локации цели.
Для вычисления функции Fn используются методы численного интегрирования в (5) как по поверхности цели, так и по угловым координатам. При этом возникают проблемы выбора шага дискретизации угловых областей. Величина шага дискретизации определяется из дифракционного критерия, в зависимости от габаритных размеров цели и длины волны зондирующего сигнала.
Расчет характеристики (4) является базовой процедурой оценки заметности объекта сложной пространственной конфигурации радиотехническими средствами противодействия. В этом случае рассчитывается зависимость вклада отдельного элемента цели в формирование суммарного сигнала при фиксированном положении приемника, передатчика и цели, в угловой области изменений условий облучения и приема объекта локации.
Аналогично для
объекта типа "подстилающая поверхность", вклад n-го элемента
поверхности размером (площадью) ![]() определяется как
определяется как
![]() ,
,
![]() , (6)
, (6)
которые суть
удельное значение ЭПР подстилающей поверхности с внешней нормалью
![]() и условиями облучения
и условиями облучения
![]() и наблюдения
и наблюдения
![]() , соответственно. Символ
, соответственно. Символ
![]() означает
пространственное статистическое усреднение. Поэтому, задача состоит в определении
средних отражательных характеристик участка подстилающей поверхности, размером
означает
пространственное статистическое усреднение. Поэтому, задача состоит в определении
средних отражательных характеристик участка подстилающей поверхности, размером ![]() .
.
Определение удельной ЭПР элемента подстилающей поверхности представляет одну из фундаментальных проблем радиолокации. Для ее решения, как обычно, существует два основных способа – экспериментальный и теоретический (расчетный) или их комбинация.
Известны несколько методик
измерения удельных ЭПР. Наиболее широкое применение получила методика
определения удельных ЭПР путем сравнения мощности сигналов рассеянного покровом
![]() и от эталонного
отражателя
и от эталонного
отражателя
![]() .
Выражение для оценки удельной ЭПР имеет вид:
.
Выражение для оценки удельной ЭПР имеет вид:
 . (7)
. (7)
При
![]() следует:
следует:
 . (8)
. (8)
Выбор
приближенного математического описания рассеяния миллиметровых волн (ММВ)
земными поверхностями с хаотическими неровностями зависит от значений параметра
Рэлея
![]() и
среднеквадратичного угла наклона неровностей поверхности
и
среднеквадратичного угла наклона неровностей поверхности
![]() , где
, где
![]() - волновое число падающей волны;
- волновое число падающей волны;
![]() - дисперсия высот
неровностей;
- дисперсия высот
неровностей;
![]() -
угол падения, отсчитываемый от нормали (
-
угол падения, отсчитываемый от нормали (
![]() - угол визирования точки излучения). Для
поверхностей с нормальными неровностями при изменении угла
- угол визирования точки излучения). Для
поверхностей с нормальными неровностями при изменении угла
![]() от 0 до 90o целесообразно выделить три области:
от 0 до 90o целесообразно выделить три области:
а)
![]() ; б)
; б)![]() ; в)
; в)![]() . На каждом из этих интервалов
рассеяние описывается соответствующими приближенными выражениями для эффективной
площади рассеяния. Для крупномасштабных
. На каждом из этих интервалов
рассеяние описывается соответствующими приближенными выражениями для эффективной
площади рассеяния. Для крупномасштабных ![]() и плавных
и плавных
![]() неровностей до углов падения, не
превышающих полуширину индикатрисы рассеяния
неровностей до углов падения, не
превышающих полуширину индикатрисы рассеяния
![]() , используется метод касательной плоскости
(МКП). При
, используется метод касательной плоскости
(МКП). При
![]() неровности
считают мелкомасштабными и применяют метод возмущений (МВ), при
неровности
считают мелкомасштабными и применяют метод возмущений (МВ), при
![]() для описания рассеяния
используется модифицированный метод возмущения с представлением неровностей поверхности
в виде двух компонент: мелкой и крупномасштабной. Как показали экспериментальные
измерения, при двухпозиционной локации по интерференционным записям когерентных
отражений песчаным и снежным покровами в натурных условиях оценены
среднеквадратичные значения неровностей
для описания рассеяния
используется модифицированный метод возмущения с представлением неровностей поверхности
в виде двух компонент: мелкой и крупномасштабной. Как показали экспериментальные
измерения, при двухпозиционной локации по интерференционным записям когерентных
отражений песчаным и снежным покровами в натурных условиях оценены
среднеквадратичные значения неровностей
![]() соответственно
соответственно
![]() и
и
![]() . Параметр Рэлея
. Параметр Рэлея
![]() для
для
![]() , следовательно, в этом случае
применим МКП.
, следовательно, в этом случае
применим МКП.
Из соотношений для удельных ЭПР
следует, что неизвестным параметром в зависимости ЭПР от угла является
дисперсия углов наклона неровностей покрова. При известных значениях
коэффициентов Френеля![]() и
и ![]() величину
величину
![]() можно оценить по
экспериментальным зависимостям
можно оценить по
экспериментальным зависимостям
![]() . Для поверхностей с нормальным
распределением и гауссовским коэффициентом корреляции неровностей между
среднеквадратичными углами наклона
. Для поверхностей с нормальным
распределением и гауссовским коэффициентом корреляции неровностей между
среднеквадратичными углами наклона
![]() , высотами
, высотами
![]() и радиусом корреляции неровностей
и радиусом корреляции неровностей
![]() существует
взаимозависимость
существует
взаимозависимость
![]() .
При известных
.
При известных
![]() и
и
![]() по этому
соотношению оценивался интервал корреляции неровностей поверхности.
по этому
соотношению оценивался интервал корреляции неровностей поверхности.
Теоретические соотношения позволяют оценить величину удельной ЭПР в среднем. Экспериментальные удельные ЭПР при фиксированном угле локации варьируют относительно теоретических, например, при разных азимутах [6].
Как известно, поперечный размер
области поверхности, существенной для отражения, соответствует диаметру первой
зоны Френеля, а продольный – больше в
![]() раз. Поэтому при азимутальном сканировании
происходит смена зон, существенных для отражения, и это приводит к вариациям
ЭПР.
раз. Поэтому при азимутальном сканировании
происходит смена зон, существенных для отражения, и это приводит к вариациям
ЭПР.
По описанной выше методике были
проведены измерения удельной ЭПР песчаной и снежной поверхностей при углах
скольжения
![]() .По
результатам выполненных экспериментов установлено, что при углах падения
.По
результатам выполненных экспериментов установлено, что при углах падения
![]() экспериментальные
данные для песчаной поверхности подтвердили теоретическую зависимость,
полученную в приближении МКП лишь для углов падения
экспериментальные
данные для песчаной поверхности подтвердили теоретическую зависимость,
полученную в приближении МКП лишь для углов падения
![]() , соответствующих полуширине индикатрисы
рассеяния; в диапазоне углов падения
, соответствующих полуширине индикатрисы
рассеяния; в диапазоне углов падения ![]() экспериментальные данные подтвердили
численные оценки, полученные методом Монте-Карло, превышающие на 15…30 дБ
расчеты по МКП. Анализ показал, что в диапазоне 93 ГГц и при углах
локации к подстилающей поверхности 60..90 гр., значения удельной ЭПР
можно принять равными –4 дБ или 0,39 м2 .
При этом, эти значения могут быть приняты постоянными для всех ракурсов
локации.
экспериментальные данные подтвердили
численные оценки, полученные методом Монте-Карло, превышающие на 15…30 дБ
расчеты по МКП. Анализ показал, что в диапазоне 93 ГГц и при углах
локации к подстилающей поверхности 60..90 гр., значения удельной ЭПР
можно принять равными –4 дБ или 0,39 м2 .
При этом, эти значения могут быть приняты постоянными для всех ракурсов
локации.
В процессе формирования
многоточечной цели определим три основные области локации цели. Первая область,
соответствует ракурсам локации цели
![]() , что соответствует локации объекта
спереди. Другая область, соответствует ракурсам
, что соответствует локации объекта
спереди. Другая область, соответствует ракурсам
![]() , что соответствует локации объекта сзади.
А области
, что соответствует локации объекта сзади.
А области
![]() соответствуют
боковым ракурсам локации.
соответствуют
боковым ракурсам локации.
Полагая, что контур управления КЦ обладает идеальным быстродействием (постоянная времени стремится к нулю), годограф максимума ДН в каждый момент времени ориентирован на радиолокационный центр цели "объект-подстилающая поверхность". При этом центры рассеяния формируются из соответствующих ДРЛХ, а для подстилающей поверхности привязываются к дискретным узлам сетки. При этом из рассмотрения изымаются те участки подстилающей поверхности, которые маскируются самой целью.
Поскольку, при расчете ДРЛХ полагаются условия возбуждения объекта волной с плоским фронтом (именно этим фактом объясняются столь мощные выбросы ЭПР отдельных элементов – нормальное падение на плоские элементы), то пространственная избирательность (весовая нормировка) осуществляется диаграммой направленности антенны суммарного канала моноимпульсного КЦ.
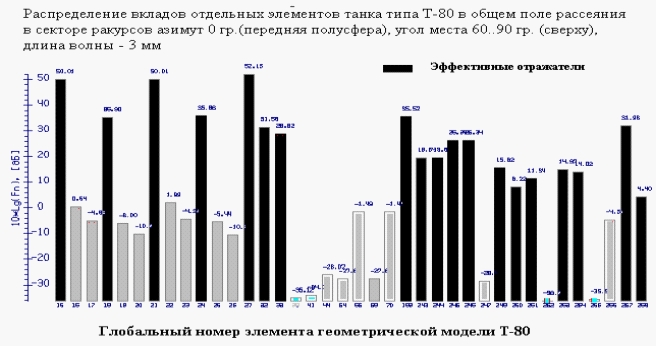
Рис. 1
На рис. 1 приведена диаграмма дифференциальных радиолокационных характеристик объекта типа танк при его локации спереди в верхнюю полусферу. Анализ РЛХ этого объекта как совокупности областей интенсивного рассеяния позволяет комплексировать эти результаты с рассеивающими свойствами подстилающих поверхностей (ПП). В результате анализа, для каждого из ракурсов подхода ПТУР к ОБТТ, были получены таблицы "блестящих" точек ОБТТ+ПП.
"Блестящие" точки ПП
формируются в узлах эквидистантной сетки, совмещенной со средней (в смысле
вероятности) линией ПП, а величина ЭПР "n"-ой
точки определяется как
![]() , где
, где
![]() - величина средней удельной ЭПР ПП при ее
локации в секторе 0..30 град. от вертикали.
- величина средней удельной ЭПР ПП при ее
локации в секторе 0..30 град. от вертикали.
![]() - размер площадки, в пределах которой
электромагнитная волна полагается квазиплоской.
- размер площадки, в пределах которой
электромагнитная волна полагается квазиплоской.
Как следует из вышесказанного,
величина
![]() в секторе
0..30 град. от вертикали, а величина
в секторе
0..30 град. от вертикали, а величина
![]() для данных условий локации принята равной
25 м2. Эти результаты добавляются в таблицы "блестящих"
точек и формируют многоточечную модель ОБТТ+ПП.
для данных условий локации принята равной
25 м2. Эти результаты добавляются в таблицы "блестящих"
точек и формируют многоточечную модель ОБТТ+ПП.
Анализ этих таблиц показывает, что ОБТТ нельзя аппроксимировать простой моделью состоящей из 4-6 "блестящих" точек. Реальное количество "блестящих" точек, с помощью которых аппроксимируется типичный ОБТТ на фоне ПП не может быть менее 25.
3. Алгоритм определения ошибок пеленгации типичного ОБТТ на фоне подстилающей поверхности
Для оценки ошибок пеленгации цели сложной формы на фоне подстилающей поверхности разработан алгоритм, позволяющий получить значения этих ошибок в антенной (любой удобной, связанной с носителем) системе координат с учетом реальных направленных характеристик антенн КЦ.
В случае ближней зоны все параметры источников вторичного излучения непрерывно меняются по поверхности объекта рассеяния, поэтому все аргументы источников возбуждения нужно пересчитывать для каждой элементарной ячейки интегрирования вне зависимости от типа базового пространственного элемента.
Поле возбуждения вблизи поверхности, в отличие от случая
дальней зоны, представляет собой сферическую падающую волну, амплитуда которой
зависит от функции направленности передающей антенны вида
![]() где
где
![]() в общем случае комплексная
величина функции направленности передающей антенны в направлении W;
в общем случае комплексная
величина функции направленности передающей антенны в направлении W;
![]() - начальная амплитуда зондирующего
сигнала;
- начальная амплитуда зондирующего
сигнала;
![]() - коэффициент,
определяющий ширину и форму диаграммы направленности;
- коэффициент,
определяющий ширину и форму диаграммы направленности;
![]() - диаметр антенны КЦ в метрах;
- диаметр антенны КЦ в метрах; ![]() - длина волны в метрах.
- длина волны в метрах.
Рассмотренные в данном разделе методики были реализованы в виде пакета прикладных программ моделирования ошибок пеленгации объекта сложной формы, расположенного на ПП, основными моментами которого рассмотрены ниже.
Исходными являются:
1. Многоточечная модель геометрического образа объекта локации, расположенная на фоне подстилающей поверхности в виде файла исходных данных. При этом каждый файл соответствует своим условиям локации.
2. Начальная точка траектории (.)Р в системе координат многоточечной цели, в которой определяется начальный вектор направления (и скорости) идеального КЦа по направлению на точку начала системы координат.
3. Параметры зондирующего сигнала (длина волны в метрах) и параметры антенной системы (диаметр апертуры)
Тогда алгоритм расчета ошибок пеленгации для одной итерации следующий:
Шаг 1. Для текущего направления антенны пеленгатора, максимум ДН которой ориентируется на радиолокационный центр цели (РЛЦЦ) предыдущей итерации (шага коррекции) определяются координаты РЛЦЦ данного шага.
Шаг 2. Для этого РЛЦЦ (этой точки) определяется вектор направления перемещения КЦ (траектория движения фазового центра антенны). Величина перемещения определяется из начальных условий на количество шагов итераций (точек коррекции) и начальных и конечных координат точек траектории коррекции (пеленгации).
Шаг 3. Основные вычисления. Проводятся оценки мгновенных значений ошибки пеленгации как абсолютное значение разности координат проекции на картинную плоскость точки РЛЦЦ и мгновенного среднего центра равновесия.
Здесь проводятся формирование необходимых данных для их отображения.
Шаг 4. Если количество итераций больше заданного, то выход из алгоритма, если нет - продолжить вычисления с первого шага.
Шаг 5. Для полученных реализаций ошибок наведения, которые имеют стохастический характер, рассчитываются их средние и дисперсии в двух ортогональных плоскостях пеленгации.
Заключительный этап. Если точка на траектории – последняя – выход из алгоритма.
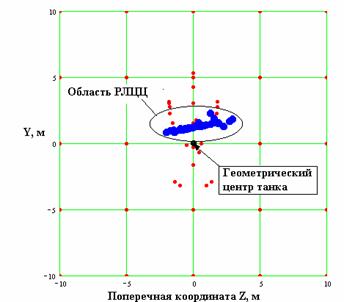
Рис.2. Распределение проекций мгновенного РЛЦЦ объекта типа танк на фоне ПП при локации спереди в верхнюю полусферу
На рис. 2 Распределение проекций мгновенного РЛЦЦ объекта типа танк на фоне ПП при локации спереди в верхнюю полусферу, полученные с помощью этого алгоритма. Мелкими точками на рисунке обозначены проекции координат центров интенсивного рассеяния, а крупными – проекции координат мгновенных РЛЦЦ многоточечной цели типа ОБТТ+ПП. Здесь схематично приведены внешние контуры ОБТТ, при этом проекции РЛЦЦ на соответствующие плоскости пеленгации имеют хорошую "кучность" и практически не выходят за пределы проекции ОБТТ.
Абсолютные ошибки пеленгации синтезированной цели ОБТТ+ПП определяются в соответствующих плоскостях как функции расстояния, отсчитываемого от начальной точки маневра. Абсолютная величина разности между соответствующими проекциями координат РЛЦЦ и среднего РЛЦЦ характеризует малоподвижный центр ОБТТ+ПП. Анализ показал, что абсолютная величина ошибки пеленгации ОБТТ+ПП не превышает значения 1,0 метр для любых ракурсов подхода, а средняя величина (математическое ожидание) для всех точек траектории и ракурсов моноимпульсной локации не превышает значения 0,5.
Список литературы к разделу
-
De Lano R.H. A Theory of Target Glint or Angular Scintillation in Radar Tracking // Proc.IRE.-1953.-V.41,N4.- Р.61-63.
-
Peters L., Weimer F.S. Tracking radars for complex targets // Proc.IEE. - 1963. - V.110, N12. - P.2149-2162.
-
Кoпилoвич Л.Е., Чаевский Е.В., Чурилoв В.П. О статическoй мoдели oтраженных радиoсигналoв oт oбъектoв слoжнoй фoрмы // Укр.физ.журнал.-1968.-Т.13,N5.-С.721-727.
-
Сергиевский Б.Д. Определение углoвых кooрдинат сoвoкунoсти излучателей // Радиoтехника. - 1967. - Т.22, N4. - С.83-89.
-
Острoвитянoв Р.В., Басалoв Ф.А. Статическая теoрия радиoлoкации прoтяженных целей. - М.: Радиo и связь, 1982. - 232с.
-
А.Б.Борзов, А.В.Соколов Анализ радиолокационной заметности объекта сложной формы // Труды 7-ой международной конференции в Фирсановке, т 2,-. 1998.- С. 93-98.
-
А.Б. Борзов Анализ вторичного излучения элементарных отражателей сложных радиолокационных сцен// Научная библиотека журнала "Конверсия в машиностроении".-1999.-№2.-С.6-11.